
人工智能实验一
A*算法的原理是设计一个评价估计函数:其中评估函数f(n)是从起始节点通过节点n的到达目标节点的最小代价路径的估计值,函数g(n)是从起始节点到n节点的已走过路径的实际代价,函数h(n)是从n节点到目标节点可能的最优路径的估计代价。在每一层搜索中,排序操作可能被执行多次,但通常排序的次数不会超过搜索的深度。上分析,因为测试的数据很少,所以无论是贪婪最佳优先搜索和A算法都可以找到最终的解,但是由于贪
- 实验目的
1. 掌握有信息搜索策略的算法思想;
2. 能够编程实现搜索算法;
3. 应用A*搜索算法求解罗马尼亚问题。
- 实验环境
使用python编程实现,并在Mindspore框架下实现。
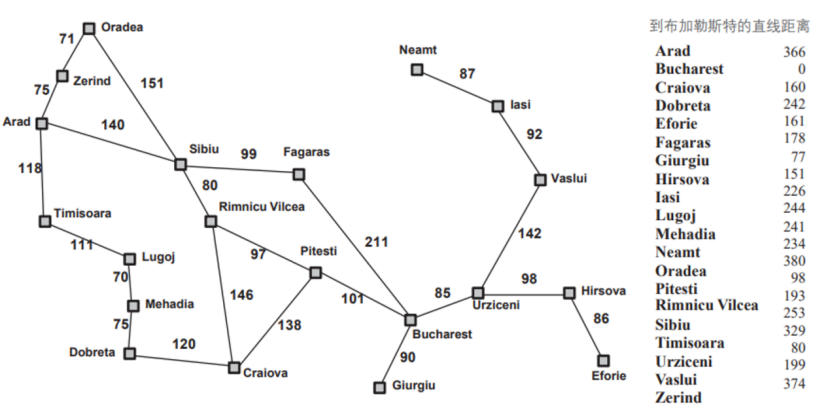
- 罗马尼亚问题说明
agent在罗马尼亚度假,目前位于 Arad 城市。agent明天有航班从Bucharest 起飞,不能改签退票。
现在你需要寻找到 Bucharest 的最短路径,在右侧编辑器补充void A_star(int goal,node &src,Graph &graph)函数,使用编写的搜索算法代码求解罗马尼亚问题:
- 实验原理
(1)A*算法的原理是设计一个评价估计函数:其中评估函数f(n)是从起始节点通过节点n的到达目标节点的最小代价路径的估计值,函数g(n)是从起始节点到n节点的已走过路径的实际代价,函数h(n)是从n节点到目标节点可能的最优路径的估计代价 。函数 h(n)表明了算法使用的启发信息,它来源于人们对路径规划问题的认识,依赖某种经验估计。根据 f(n)可以计算出当前节点的代价,并可以对下一次能够到达的节点进行评估。采用每次搜索都找到代价值最小的点再继续往外搜索的过程,一步一步找到最优路径。
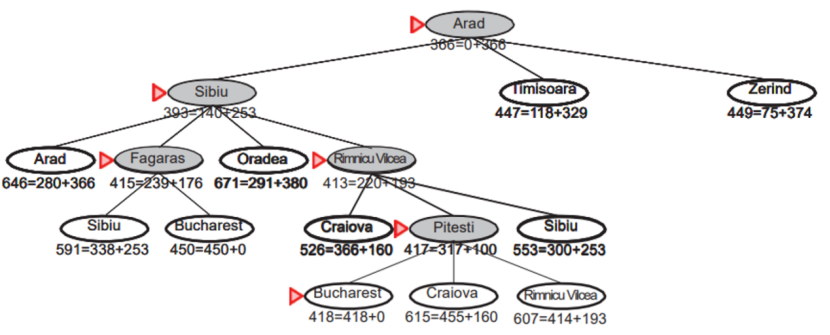
(2)根据题目要求,得到搜索树:初始给定出发节点,放入队列中,然后进行扩展操作。
- 实验内容及步骤
- 创建搜索树:通过递归创建节点(Node)来构建的
Node 类是实现 A* 搜索算法中的核心组件之一,代表搜索树中的一个节点,每个节点包含以下属性和方法:
属性:
- state:节点的状态,通常是问题域中的一个具体位置或配置。
- parent:指向该节点的父节点,用于回溯找到路径。
- action:从父节点到该节点所采取的动作。
- path_cost:从起始节点到当前节点的路径代价。
- depth:节点在搜索树中的深度,从根节点(深度为0)开始计算。
方法:
- Init:初始化节点的属性。如果存在父节点,则当前节点的深度是父节点的深度加1。
- repr:返回节点的字符串表示,方便打印和调试。
- lt:定义节点的小于比较,基于节点的状态,用于排序。
- expand:扩展当前节点,生成所有可能的子节点。调用 problem.actions(self.state) 获取所有可能的动作,然后对每个动作生成一个子节点。
- child_node:根据给定的动作生成一个子节点。调用 problem.result(self.state, action) 获取动作的结果状态,然后创建一个新的 Node 实例。
- solution:从当前节点回溯到根节点,获取路径上的所有状态。使用 self.path() 方法回溯路径,并返回路径上的状态列表。
- path:回溯当前节点到根节点的路径。使用递归或循环方式回溯到根节点,并返回路径上的节点列表。
- eq:定义节点的等价性,基于节点的状态。用于比较两个节点是否相等。
- hash:为节点定义哈希值,基于节点的状态。允许节点被用作哈希表的键,在字典中存储节点。
- 实现A*搜索算法:
首先,在实现A*算法之前,定义了一个抽象基类Problem类,它定义了使用 A* 搜索算法解决问题时所需的接口和基本框架。具体的问题实现需要继承这个类,并实现其中的抽象方法。以下是每个方法的简要说明:
- init:初始化问题实例,需要提供初始状态 initial 和(可选的)目标状态 goal。
- Actions:抽象方法,需要在子类中实现。该方法应该返回给定状态 state 下所有可能的动作。
- Result:抽象方法,需要在子类中实现。该方法应该根据当前状态 state 和一个动作 action 计算出新的状态。
- goal_test:检查给定状态 state 是否是目标状态。如果 goal 是一个列表,使用 is_in 函数(需要在外部定义)检查状态是否在列表中;否则,直接比较状态是否相等。
- path_cost:计算从状态 state1 通过动作 action 到状态 state2 的路径代价。这里简单地将代价设为前一个代价 c 加 1,实际应用中可能需要根据具体情况计算代价。
- value:抽象方法,需要在子类中实现。该方法应该返回给定状态 state 的启发式估计值,即从该状态到目标状态的估计代价。
A*算法的实现:
函数定义:astar_search 函数接受一个 problem 对象作为参数,这个对象包含了问题的定义,包括初始状态、目标状态、可能的动作、状态转移函数、路径代价计算函数等。
- 初始化
- 进入循环,直到找到目标节点或开放列表为空。
- 节点扩展:从 frontier 中取出成本最低的节点(这里是列表的第一个元素)。如果这个节点是目标节点,打印出路径代价,并返回路径。将节点从 frontier 中移除,并添加到 explored 列表中。
- 子节点生成:对于当前节点的每个邻居,生成一个新的子节点。计算子节点的路径代价,包括从起点到当前节点的代价加上从当前节点到子节点的代价。
- 子节点检查和更新:检查子节点是否已经在 explored 或 frontier 中:如果不在,将子节点添加到 frontier 中。如果已存在,但新计算的路径代价更低,则更新该节点的路径代价。
- 排序:对 frontier 中的节点根据其路径代价和启发式代价(即到目标的直线距离)进行排序,以确保下一个循环中能够优先处理代价最低的节点。
3.使用编写的搜索算法代码求解罗马尼亚问题:
- 定义问题Problem类
- 定义Node节点
- 定义罗马尼亚地图问题的数据结构
包括但不限于:
- neighbor_map:城市之间的邻居关系。

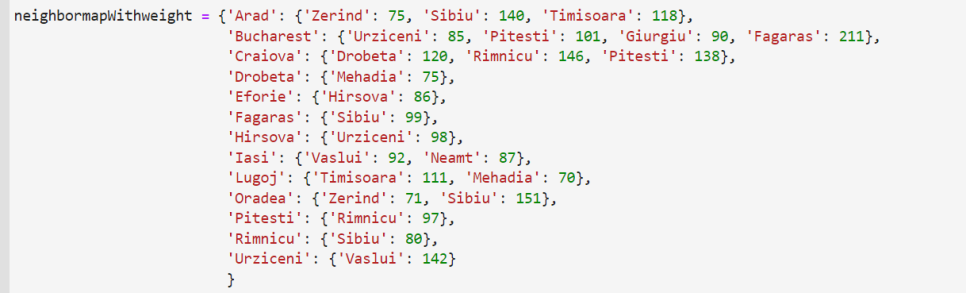
- neighbormapWithweight:带权重的城市邻居关系,表示城市间的距离
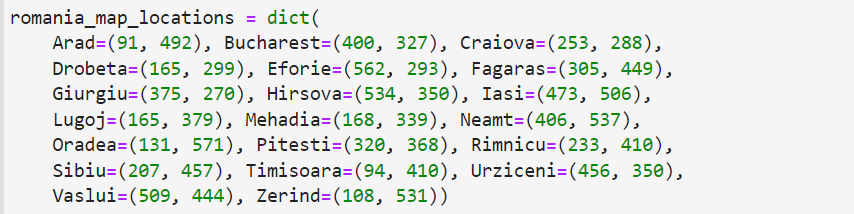
- romania_map_locations:城市的坐标。
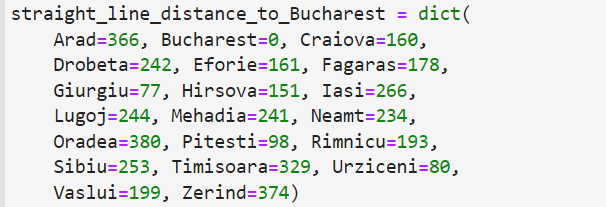
- straight_line_distance_to_Bucharest:每个城市到目标城市的直线距离。
- city_neighbor:每个城市的所有邻居及其权重。
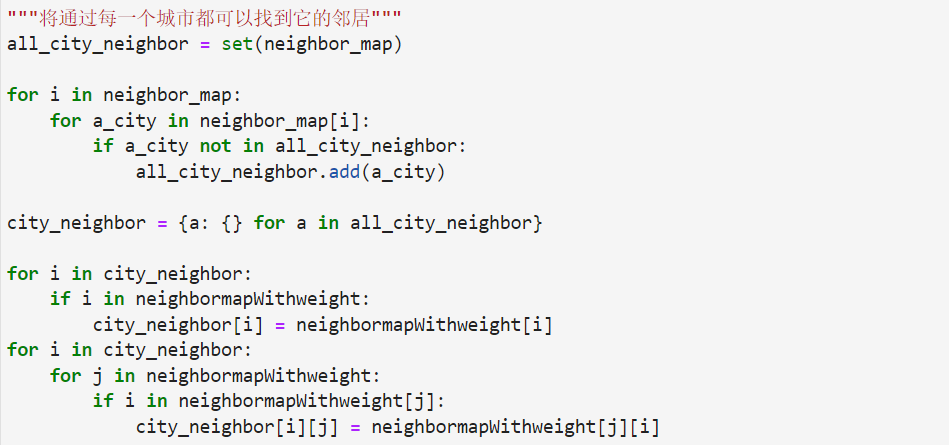
构建完整的邻居关系:
- start_to_goal_distance:每个城市到目标城市的直线距离。
计算每个城市到目标城市的距离:

- A*算法
- 实现并输出A*搜索的路径

import math
import sys
from collections import deque
class Problem:
#初始化问题实例
def __init__(self, initial, goal=None):
self.initial = initial
self.goal = goal
#返回给定状态下所有可能的动作
def actions(self, state):
raise NotImplementedError
#根据当前状态和一个动作计算出新的状态。
def result(self, state, action):
raise NotImplementedError
#检查给定状态是否是目标状态
def goal_test(self, state):
if isinstance(self.goal, list):
return is_in(state, self.goal)
else:
return state == self.goal
#计算从状态state1通过动作action到状态state2的路径代价
def path_cost(self, c, state1, action, state2):
return c + 1
#返回给定状态的启发式估计值
def value(self, state):
raise NotImplementedError
class Node:
#初始化节点属性
def __init__(self, state, parent=None, action=None, path_cost=0):
self.state = state
self.parent = parent
self.action = action
self.path_cost = path_cost
self.depth = 0
if parent:
self.depth = parent.depth + 1
#返回节点的字符串表示
def __repr__(self):
return "<Node {}>".format(self.state)
#比较
def __lt__(self, node):
return self.state < node.state
#扩展当前节点
def expand(self, problem):
return [self.child_node(problem, action)
for action in problem.actions(self.state)]
#根据给定动作生成一个子节点
def child_node(self, problem, action):
next_state = problem.result(self.state, action)
next_node = Node(next_state, self, action, problem.path_cost(self.path_cost, self.state, action, next_state))
return next_node
#回溯到根节点
def solution(self):
return [node.state for node in self.path()[0:]]
#回溯当前节点到根节点的路径
def path(self):
node, path_back = self, []
while node:
path_back.append(node)
node = node.parent
return list(reversed(path_back))
#比较两个节点是否相等
def __eq__(self, other):
return isinstance(other, Node) and self.state == other.state
#存储节点
def __hash__(self):
return hash(self.state)
neighbor_map = {'Arad': ['Zerind', 'Sibiu', 'Timisoara'], 'Bucharest': ['Urziceni', 'Pitesti', 'Giurgiu', 'Fagaras'],
'Craiova': ['Drobeta', 'Rimnicu', 'Pitesti'], 'Drobeta': ['Mehadia'], 'Eforie': ['Hirsova'],
'Fagaras': ['Sibiu'], 'Hirsova': ['Urziceni'], 'Iasi': ['Vaslui', 'Neamt'],
'Lugoj': ['Timisoara', 'Mehadia'],
'Oradea': ['Zerind', 'Sibiu'], 'Pitesti': ['Rimnicu'], 'Rimnicu': ['Sibiu'], 'Urziceni': ['Vaslui']}
neighbormapWithweight = {'Arad': {'Zerind': 75, 'Sibiu': 140, 'Timisoara': 118},
'Bucharest': {'Urziceni': 85, 'Pitesti': 101, 'Giurgiu': 90, 'Fagaras': 211},
'Craiova': {'Drobeta': 120, 'Rimnicu': 146, 'Pitesti': 138},
'Drobeta': {'Mehadia': 75},
'Eforie': {'Hirsova': 86},
'Fagaras': {'Sibiu': 99},
'Hirsova': {'Urziceni': 98},
'Iasi': {'Vaslui': 92, 'Neamt': 87},
'Lugoj': {'Timisoara': 111, 'Mehadia': 70},
'Oradea': {'Zerind': 71, 'Sibiu': 151},
'Pitesti': {'Rimnicu': 97},
'Rimnicu': {'Sibiu': 80},
'Urziceni': {'Vaslui': 142}
}
romania_map_locations = dict(
Arad=(91, 492), Bucharest=(400, 327), Craiova=(253, 288),
Drobeta=(165, 299), Eforie=(562, 293), Fagaras=(305, 449),
Giurgiu=(375, 270), Hirsova=(534, 350), Iasi=(473, 506),
Lugoj=(165, 379), Mehadia=(168, 339), Neamt=(406, 537),
Oradea=(131, 571), Pitesti=(320, 368), Rimnicu=(233, 410),
Sibiu=(207, 457), Timisoara=(94, 410), Urziceni=(456, 350),
Vaslui=(509, 444), Zerind=(108, 531))
straight_line_distance_to_Bucharest = dict(
Arad=366, Bucharest=0, Craiova=160,
Drobeta=242, Eforie=161, Fagaras=178,
Giurgiu=77, Hirsova=151, Iasi=266,
Lugoj=244, Mehadia=241, Neamt=234,
Oradea=380, Pitesti=98, Rimnicu=193,
Sibiu=253, Timisoara=329, Urziceni=80,
Vaslui=199, Zerind=374)
"""将通过每一个城市都可以找到它的邻居"""
all_city_neighbor = set(neighbor_map)
for i in neighbor_map:
for a_city in neighbor_map[i]:
if a_city not in all_city_neighbor:
all_city_neighbor.add(a_city)
city_neighbor = {a: {} for a in all_city_neighbor}
for i in city_neighbor:
if i in neighbormapWithweight:
city_neighbor[i] = neighbormapWithweight[i]
for i in city_neighbor:
for j in neighbormapWithweight:
if i in neighbormapWithweight[j]:
city_neighbor[i][j] = neighbormapWithweight[j][i]
start = "Arad"
goal = "Bucharest"
start_to_goal_distance = dict()
for i in romania_map_locations:
"""用直线距离"""
start_to_goal_distance[i] = math.sqrt((romania_map_locations[i][0] - romania_map_locations[goal][0]) ** 2
+ (romania_map_locations[i][1] - romania_map_locations[goal][1]) ** 2)
"""A*搜索"""
def astar_search(problem):
node_new = Node(problem.initial) # 初始化node结点
frontier = [] # frontier表的初始化
frontier.append(node_new) # 添加初始结点
explored = [] # explored表初始化
while True:
# 当frontier表中没有结果时返回失败
if len(frontier) == 0:
return
# 从frontier表中取出最优的结点拓展
node_new = frontier[0]
# 从frontier表中删除已经拓展的结点
del frontier[0]
# 若找到目标结点则对路径进行输出
if problem.goal_test(node_new.state):
print("最小的代价值为", node_new.path_cost)
return node_new.solution()
# 将已经搜索表拓展新的结点
explored.append(node_new)
# 搜索并拓展新的frontier表
for p in city_neighbor[node_new.state]:
child = Node(p, node_new, None, (city_neighbor[node_new.state][p] + node_new.path_cost))
# 如果新的子结点不在explored和frontier中,则在frontier表中加入新的拓展结点
figure = 0
for i in explored or frontier:
if i.state == child.state:
figure += 1
if figure <= 0:
# if child.state not in explored or frontier:
frontier.append(Node(child.state, node_new, None, child.path_cost))
# 如果新结点在frontier中,则更新其一致代价
else:
for i in frontier:
if i.state == child.state:
if i.path_cost < child.path_cost:
i.path_cost = child.path_cost
break
# 对新加入的结点或者更新的结点进行排序
frontier = sorted(frontier, key=lambda x: x.path_cost + start_to_goal_distance[x.state])
"""实现并输出A*搜索的路径"""
romania_problem = Problem(start, goal)
road = astar_search(romania_problem)
print(road)
- 分析算法的时间复杂度。
- 考虑节点扩展:对于每个节点,算法需要遍历其所有邻居。在罗马尼亚地图问题中,每个城市的平均邻居数量是有限的,我们可以假设每个城市大约有 k 个邻居。因此,对于 n 个城市,算法可能需要扩展 n * k 个节点。
- 启发式函数评估:启发式函数是基于每个城市到目标城市的直线距离,对于每个节点,启发式函数的评估是常数时间 O(1)。
- 排序操作:每次扩展节点后,需要对开放列表进行排序。最坏情况下,开放列表中有 n 个节点,排序的时间复杂度是 O(n log n)。在每一层搜索中,排序操作可能被执行多次,但通常排序的次数不会超过搜索的深度。
所以,时间复杂度为: O(n * k * n log n)。
- 实验结果:

- 思考题
- 宽度优先搜索,深度优先搜索,一致代价搜索,迭代加深的深度优先搜索算法哪种方法最优?
- 宽度优先搜索(BFS):
优点:保证找到的路径是最短的(如果存在解)。
缺点:在广度上扩展,可能需要很大的内存空间,特别是在深搜问题中。
适用场景:目标节点离起点不远,或者图的分支不深的问题。
- 深度优先搜索(DFS):
优点:内存消耗较小,因为它一次只扩展一个分支。
缺点:可能找不到最短路径,且可能陷入无法到达目标的无限深的分支。
适用场景:目标节点在起点的特定方向上,或者需要探索所有可能路径的问题。
- 一致代价搜索:
优点:每次扩展代价相同的节点,可以看作是BFS的一种优化,减少了需要存储的节点数。
缺点:在某些情况下可能不如BFS直观。
适用场景:当所有步骤的代价相同时,可以优化BFS。
- 迭代加深的深度优先搜索(IDDFS):
优点:结合了DFS和BFS的优点,通过限制搜索深度来逐步扩展搜索范围。
缺点:实现较为复杂,且在最坏情况下可能与DFS一样糟糕。
适用场景:适用于那些目标深度未知或者变化的问题。
它们各自适合不同的场景。选择哪种算法取决于具体问题的性质,如搜索空间的大小、解的路径长度、内存限制等。
2.贪婪最佳优先搜索和A*搜索那种方法最优?
- 从完备性角度上分析,因为测试的数据很少,所以无论是贪婪最佳优先搜索和A算法都可以找到最终的解,但是由于贪婪最佳优先搜索的性质,存在无解的情况,而A算法在满足一致性条件和可采纳性条件的情况下一定能求出解。
- 从最优性角度上分析:通过罗马尼亚旅游问题可以看出,A*搜索算法的结果要明显优于贪婪最佳优先搜索,并且在满足一致性条件和可采纳性条件的基础上可以求出最优解。
- 从时间和空间复杂度角度上分析:因为这两种算法虽然搜索的算法是相似的,A*是贪婪最佳优先算法的优化算法,只有启发函数的判断存在差异,所以时间和空间复杂度可以判断为相同。
3. 分析比较无信息搜索策略和有信息搜索策略。
无信息:无信息搜索策略不使用或无法使用关于搜索空间的额外信息(如启发式信息)来指导搜索。如:宽度优先搜索,深度优先搜索等。实现简单,不需要对问题域有深入了解。可能需要探索巨大的搜索空间,特别是在解空间很大时。也无法保证找到最优解,尤其是在代价不同的路径中。
有信息:有信息搜索策略使用关于搜索空间的额外信息(启发式信息)来指导搜索。如:贪婪最佳优先搜索,A*搜索。通常比无信息搜索策略更高效,因为它们使用启发式信息来减少搜索空间。A*搜索在启发式函数满足某些条件时可以保证找到最优解。实现比无信息搜索策略复杂,需要设计和实现启发式函数。性能依赖于启发式函数的质量,不好的启发式函数可能导致性能下降。
实验收获
- 学习到如何使用优先队列(代码使用了列表和排序来模拟优先队列的行为)来存储待探索的节点,以及如何使用已探索列表来避免重复探索相同的节点。
- 学习到A*算法的原理,更加深入的理解到它如何结合实际代价(g(n))和启发式估计(h(n))来寻找最优路径。
- 思考题中比较无信息搜索的几种方法,有信息搜索的两种方法,并比较了有无信息搜索;能够让我们学习搜索算法更加系统化。

GitCode 天启AI是一款由 GitCode 团队打造的智能助手,基于先进的LLM(大语言模型)与多智能体 Agent 技术构建,致力于为用户提供高效、智能、多模态的创作与开发支持。它不仅支持自然语言对话,还具备处理文件、生成 PPT、撰写分析报告、开发 Web 应用等多项能力,真正做到“一句话,让 Al帮你完成复杂任务”。
更多推荐



 21
21 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)