
基于 MATLAB 的存储库为固定翼飞机实施了 6-DOF 非线性仿真和控制系统。
基于 MATLAB 的存储库为固定翼飞机实施了 6-DOF 非线性仿真和控制系统。简介:该代码基于 MATLAB 的存储库为固定翼飞机实施了 6-DOF 非线性仿真和控制系统。该系统包括运动方程模型、配平、线性化和采用状态反馈的俯仰、滚动和空速模块化控制器。它初始化了飞机的物理和几何参数、气动系数、初始状态以及控制输入。通过Runge-Kutta四阶方法对刚体运动方程进行积分,实时更新飞机的状态。
基于 MATLAB 的存储库为固定翼飞机实施了 6-DOF 非线性仿真和控制系统。
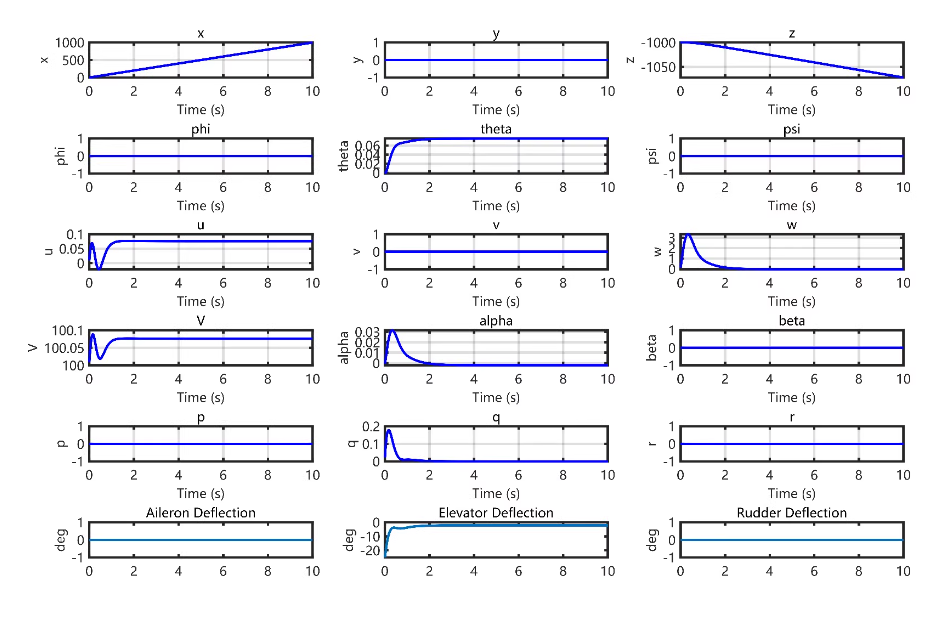
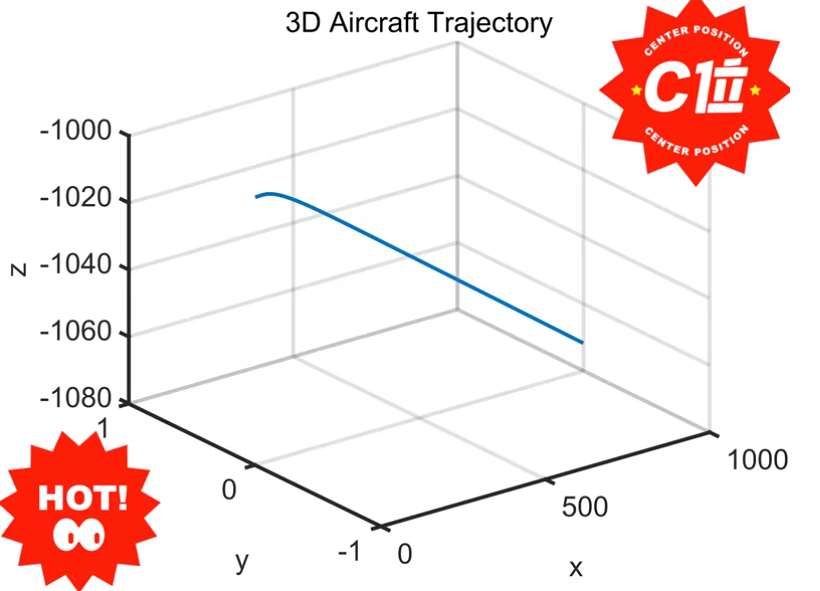
简介:该代码基于 MATLAB 的存储库为固定翼飞机实施了 6-DOF 非线性仿真和控制系统。该系统包括运动方程模型、配平、线性化和采用状态反馈的俯仰、滚动和空速模块化控制器。它初始化了飞机的物理和几何参数、气动系数、初始状态以及控制输入。通过Runge-Kutta四阶方法对刚体运动方程进行积分,实时更新飞机的状态。控制器根据飞行目标生成控制信号,调整副翼、升降舵、方向舵和油门,以控制飞行姿态和速度。结果以时域响应图和3D轨迹图直观展示飞机的运动行为,助力飞行控制算法的验证与优化。
一下文字及示例代码仅供参考
你提到的内容涉及使用 MATLAB 对固定翼飞机进行 6自由度(6-DOF)非线性动力学仿真 并设计其 控制系统。这是一个在航空航天工程、飞行器控制和机器人领域中常见的课题。
🎯 项目目标概述:
你的目标可能是:
- 建立一个非线性六自由度动力学模型来模拟真实飞机的飞行行为;
- 设计并实现控制系统(如姿态控制器、航路跟踪控制器等);
- 在 MATLAB/Simulink 中进行仿真验证;
- 可能还包括与实际飞行数据或硬件平台对接。
✅ 实现步骤概览:
1. 建立飞机动力学模型(6-DOF)
包括以下内容:
- 运动学方程(Kinematics):描述位置、姿态随时间变化的关系。
- 动力学方程(Kinetics):描述力、力矩与加速度之间的关系。
- 使用适当的坐标系,例如:
- 地面坐标系 (ECEF or NED)
- 飞机体坐标系(Body-fixed frame)
状态变量通常包括:
| 类别 | 状态变量 |
|---|---|
| 位置 | $ x, y, z $ |
| 速度 | $ u, v, w $(体轴系下) |
| 姿态 | 欧拉角:$ \phi, \theta, \psi $ |
| 角速度 | $ p, q, r $ |
动力学模型形式(简化):
x˙=f(x,u) \dot{\mathbf{x}} = f(\mathbf{x}, \mathbf{u}) x˙=f(x,u)
其中:
- x\mathbf{x}x 是状态向量(12维)
- u\mathbf{u}u 是控制输入(如舵面偏转、推力等)
2. 控制系统设计
常见控制策略:
- PID控制:适用于简单姿态控制
- LQR / LQG控制:用于多变量最优控制
- 反步法(Backstepping)
- 滑模控制(Sliding Mode Control)
- 自适应控制
- 模型预测控制(MPC)
控制目标示例:
- 稳定飞行姿态(俯仰、滚转、偏航)
- 跟踪参考轨迹(高度、航迹角、航点)
- 自动起飞/降落逻辑
3. MATLAB/Simulink 实现
工具推荐:
- Simulink:图形化建模与仿真
- Aerospace Blockset / Toolbox:提供标准大气模型、坐标转换模块、飞行动力学模板等
- Control System Toolbox:用于控制器设计与分析
- Simscape Multibody(可选):物理建模
- FlightGear / X-Plane 接口插件(可选):可视化飞行仿真
4. 仿真与验证
常用方法:
- 设置不同初始条件测试稳定性
- 加入风扰动、传感器噪声等非理想因素
- 使用动画或仪表盘显示飞行状态
- 与真实飞行数据对比验证模型精度
5. 可拓展方向
- 与 自动驾驶仪(Autopilot) 结合(如 ArduPilot、PX4)
- 使用 强化学习(Reinforcement Learning) 训练智能控制器
- 开发 GUI 用户界面(App Designer)
- 支持代码生成(如使用 Simulink Coder 生成嵌入式代码)

GitCode 天启AI是一款由 GitCode 团队打造的智能助手,基于先进的LLM(大语言模型)与多智能体 Agent 技术构建,致力于为用户提供高效、智能、多模态的创作与开发支持。它不仅支持自然语言对话,还具备处理文件、生成 PPT、撰写分析报告、开发 Web 应用等多项能力,真正做到“一句话,让 Al帮你完成复杂任务”。
更多推荐



 33
33 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)