
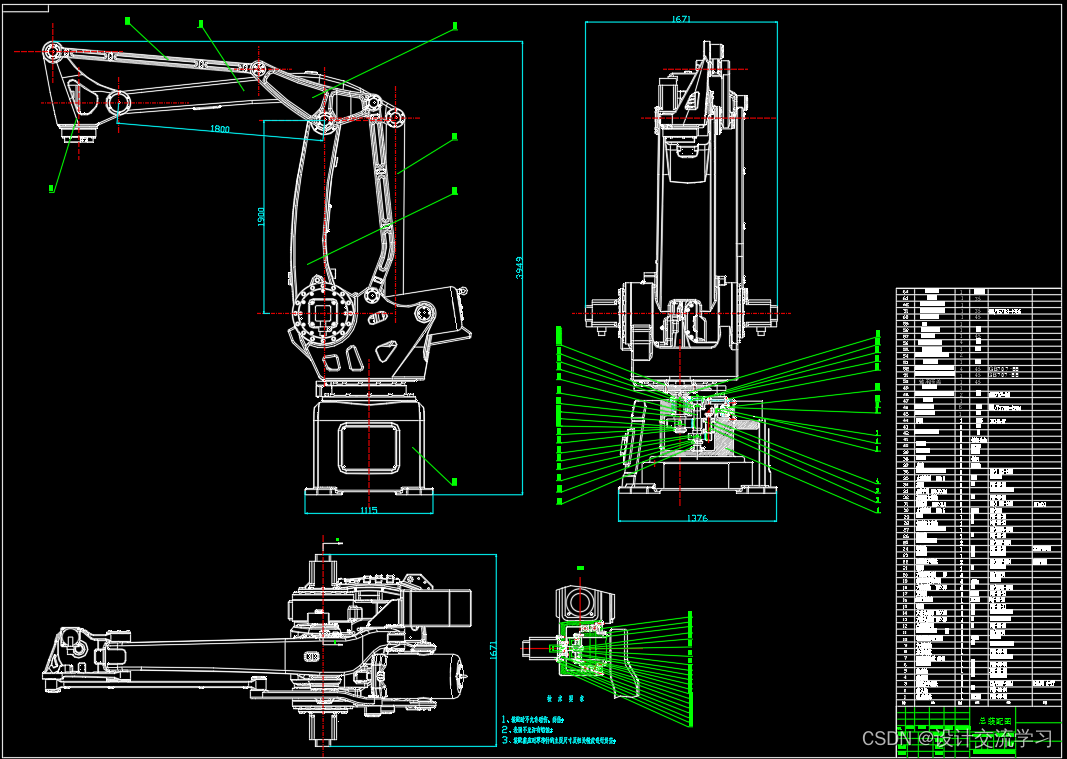
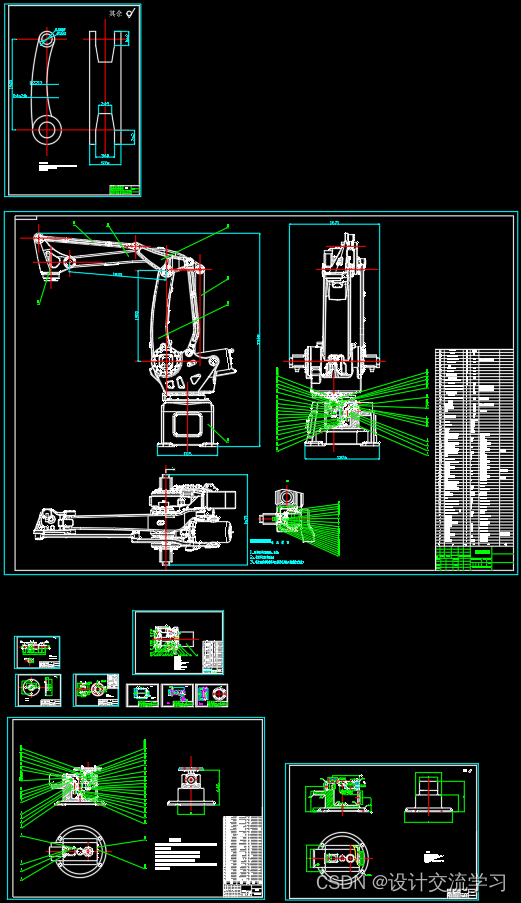
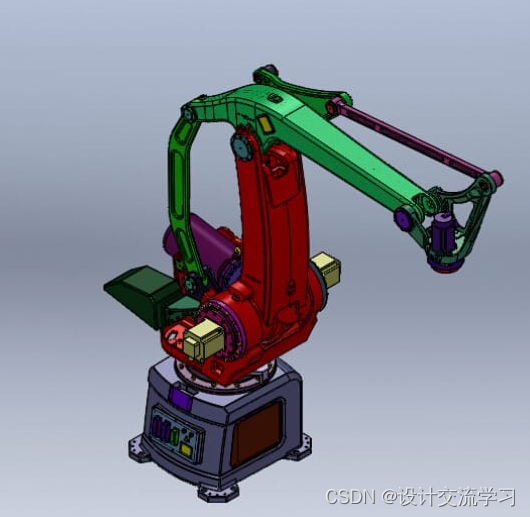
10KG包装袋码垛机器人机械臂的设计(论文+CAD图纸+UG三维+中英文翻译文献+任务书)
随着机器人作业精度的提高和作业环境的复杂化,急需开发新型的微动机构来保证机器人的动作精度,开发多关节,多自由度的手臂和手指及新型的行走机构,以适应日益复杂作业需求。包装的种类、工厂环境和客户需求,物体的安全性等,使得码垛成为越来越艰巨的任务,为了克服这些困难,码垛设备的各个方面都在不断地发展改进,如从机械手到操纵它的软件,现在对灵活性的需求也在不断增加。完成码垛型机器人的程序设计,总体设计,结构设
摘 要
机器人技术是机电一体化产品,码垛机器人成为一个领先的研究课题。运用在不同领域,如机械,电子,信息理论,人工智能,生物学和计算机,知识等诸多领域的发展机械接头端的设计,机器人也导致了这些学科的发展。码垛型机器人是一种典型的机电一体化产品,工艺多码垛运动的一个热点手臂运动更多的领域进行合作研究。机械,电子,信息理论,人工智能,知识和生物和计算机许多学科,但其发展的多机构衔接所需组合码垛也促成了这些学科的发展。
本文采用在结构设计上的轻质石膏墙板码垛机械手,并完成图纸和零件图总装配图。为机器人模型的要求被分析以估计电机的每个码垛,充分的设得所需要的转矩和功率。完成码垛型机器人的程序设计,总体设计,结构设计,运动学模型操盘分析,检查,分析机器人模型,设计和生产机器人模型做的过程中强度的关键部件,绘制3D图。
关键词:机械臂,结构设计,轻质石膏墙板码垛机械手,电机
Abstract
Robot technology is an electromechanical integrated product, and palletizing robots have become a leading research topic. The development of mechanical connectors in various fields such as mechanics, electronics, information theory, artificial intelligence, biology and computer science, knowledge, and the design of robots have also led to the development of these disciplines. Stacking robots are a typical mechatronic integrated product, which is a hot topic in the field of multi stacking motion. Collaborative research on arm movement is being conducted in more fields. Many disciplines, including mechanics, electronics, information theory, artificial intelligence, knowledge, biology, and computer science, have also contributed to the development of these disciplines due to the combination and stacking required for their multi institutional connections.
This article adopts a lightweight gypsum wall panel stacking manipulator in structural design, and completes the overall assembly drawing of the drawings and parts. The requirements of the robot model are analyzed to estimate the required torque and power for each pallet of the motor, with sufficient settings. Complete the program design, overall design, structural design, kinematic model manipulation analysis, inspection, and analysis of the palletizing robot model. Design and produce key components for the strength of the robot model during the process, and draw 3D diagrams.
Keywords: robotic arm, structural design, lightweight gypsum wall panel palletizing robot arm, motor
目 录
1 绪论
1.1课题的背景、来源及意义
近几十年来,随着我国经济持续发展及科学技术的突飞猛进,机器人在码垛机、弧焊、喷涂、点焊、码垛、涂胶、测量等行业有着越来越广泛的应用。机器人是一个在三维空间中具有较多自由度,并能实现诸多拟人动作和功能的机器。工业机器人则是在工业生产上应用的机器人,是一种典型的机电一体化装置。工业机器人是用来码垛材料零件工具等可再编程的多功能机械手。它综合运用了机械与精密机械、微电子与计算机、自动控制与驱动、传感器与信息处理以及人工智能等多学科的最新研究成果。
码垛技术是物流自动化技术领域的一门新兴技术,所谓的码垛就是按照集成单元化思想,将一件件物料按照一定的模式堆码成垛,以便使单元化的物垛实现物料的码垛、装卸、运输、存储、等物流活动。在物体的运输过程中除了散装的物体和液体外,一般的物体都是以码垛的形式进行存储或组装,这样即可承载更多的物体,又可节省空间。随着物流的飞速发展以及科技的突飞猛进,码垛技术应用越来越广泛,尤其是在环境较恶劣或人工很难做到的情况下。包装的种类、工厂环境和客户需求,物体的安全性等,使得码垛成为越来越艰巨的任务,为了克服这些困难,码垛设备的各个方面都在不断地发展改进,如从机械手到操纵它的软件,现在对灵活性的需求也在不断增加。
码垛机器人是一种具有特殊功能的垂直多关节型机器人,广泛应用于石油、化工、食品加工、饮料等领域。可通过主计算机根据不同的物料包装、堆垛顺序、层数等参数进行设置实现不同型包装的码垛要求。而机器人码垛技术是自动化物料后处理成套设备中的关键技术之一,随着自动称重、包装技术的发展和性能指标的提高,对码垛技术也提出了更高的要求。码垛机器人手臂应具有一定的刚度和强度,防止弹性变形和断裂。手腕码垛的东西较重,这对其精度提出了更高要求。
为满足自动化生产线产品码垛及码垛的要求,本课题要求设计一种码垛机器人的机械结构部分。结合机、电、软、硬件各自特点和优势互补的基础上,对码垛机器人整体机械结构、传动系统进行分析和设计,提出了一套经济型设计方案。
1.2 码垛机器人的发展进程及发展趋势
自从20世纪80年代,我国码垛机器人在国家支持下,通过“七五”、“八五”科技攻关,经过几十年的发展,我国在机器人领域取得了很大成就。按机器人的发展进程,分为三代机器人。第一代机器人,具有示教再现功能或具有可编程的NC装置,但对外部信息不具备反馈能力;第二代机器人,不仅具有内部传感器,能获取外部环境信息。虽然没有应用人工智能技术,但是能进行机器人-环境交互,具有在线自适应能力;第三代机器人,具有多种智能传感器,能感知和领会外部环境信息。目前码垛机器人的应用主要在以下两个方面。恶劣工作环境,危险工作场合.这个领域的做业是一种有害于健康,并危及生命或不安全因素很大而不宜于人去干的作业。例如在冲床上下料、采矿、锻造等。
第二个是自动化生产领域。码垛机器人可用来上下料、码垛、卸货以及抓取零件重新定向等作业。一个简单抓放作业机器人只需较少的自由度,一个给零件定向作业的机器人要求具有更多的自由度,增加其灵巧性。工业机器人具有减少劳动力费用、提高生产率、改进产品质量、增加制造过程的柔性、减少材料浪费、控制和加快库存的周转、降低成本、消除了危险和恶劣的劳动岗位。目前工业机器人的开发正处在一个蓬勃发展的阶段,在先进的工业发达国家里,工业机器人的开发与制造正在形成一个庞大的产业,全世界每年的工业机器人销售额可达42亿美元。尽管如此,工业机器人产业仍在不断拓展,不断向新的领域进军。我国工业机器人的应用前景十分宽广的。但是,由于我国工业基础比较薄弱,劳动力比较丰富、低廉,给工业机器人的发展带来一定的困难。只有符合我国的国情,才能推动和加快我国工业机器人的发展和应用。工业机器人功能部件的标准化与模块化是提高机器人的运动精度,运动速度,减低成本和提高可靠性的重要途径。近几年各国注重发展组合式工业机器人。它是采用标准化的模块件或组合件拼装而成。除了工业机器人用的各种伺服电机,传感器外,手臂,手腕和机身也以标准化。随着机器人作业精度的提高和作业环境的复杂化,急需开发新型的微动机构来保证机器人的动作精度,开发多关节,多自由度的手臂和手指及新型的行走机构,以适应日益复杂作业需求。
…………
…………

GitCode 天启AI是一款由 GitCode 团队打造的智能助手,基于先进的LLM(大语言模型)与多智能体 Agent 技术构建,致力于为用户提供高效、智能、多模态的创作与开发支持。它不仅支持自然语言对话,还具备处理文件、生成 PPT、撰写分析报告、开发 Web 应用等多项能力,真正做到“一句话,让 Al帮你完成复杂任务”。
更多推荐



 2
2 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)