
使用Python进行图像几何变换
本文介绍了图像处理中的基本几何变换操作。主要包括图像缩放、平移、旋转等基础变换,以及仿射变换和透射变换等高级变换方法。同时讲解了图像金字塔的构建方法,包括向上采样(pyrUp)和向下采样(pyrDown)。这些变换主要通过OpenCV的函数实现,如warpAffine()用于执行平移和旋转,getAffineTransform()和getPerspectiveTransform()分别用于生成仿射
算数操作
图像的加法
OpenCV加法是饱和操作,Numpy加法是模运算。
import cv2
import numpy as np
x = np.uint8([250])
y = np.uint8([10])
print(x) # [[250]]
print(y) # [[10]]
print(cv2.add(x, y)) # [[255]]
print(x + y) # [4]
OpenCV加法
# cv2.add() 是 OpenCV 中用于执行图像加法运算的核心函数,与 Python 的普通加法运算符 (+) 不同,它使用饱和运算防止溢出。
dst = cv2.add(src1, src2[, dst[, mask[, dtype]]])| 参数 | 类型 | 描述 |
|---|---|---|
src1 |
numpy.ndarray | 第一个输入数组(图像) |
src2 |
numpy.ndarray 或 标量 | 第二个输入数组或标量值 |
dst |
numpy.ndarray (可选) | 输出数组(与输入相同大小和类型) |
mask |
numpy.ndarray (可选) | 8位单通道掩码,指定要修改的输出数组元素 |
dtype |
int (可选) | 输出数组的深度(如 cv2.CV_8U, cv2.CV_32F) |
中文标题会乱码,干脆使用英文标题了,键盘按下任意键退出,只是关闭窗口程序不会结束。
import cv2
# 读取两张相同尺寸的图像
img1 = cv2.imread("image1.jpg") # 替换为你的图片路径
img2 = cv2.imread("image2.jpg") # 替换为你的图片路径
# 检查图像是否成功读取
if img1 is None or img2 is None:
print("错误:无法读取图像文件")
exit()
# 调整img2尺寸匹配img1
if img1.shape != img2.shape:
img2 = cv2.resize(img2, (img1.shape[1], img1.shape[0])) # 注意宽高顺序
# 直接相加
result = cv2.add(img1, img2)
# 显示结果
cv2.imshow("OpenCV Addition", result)
cv2.waitKey(0)
cv2.destroyAllWindows()

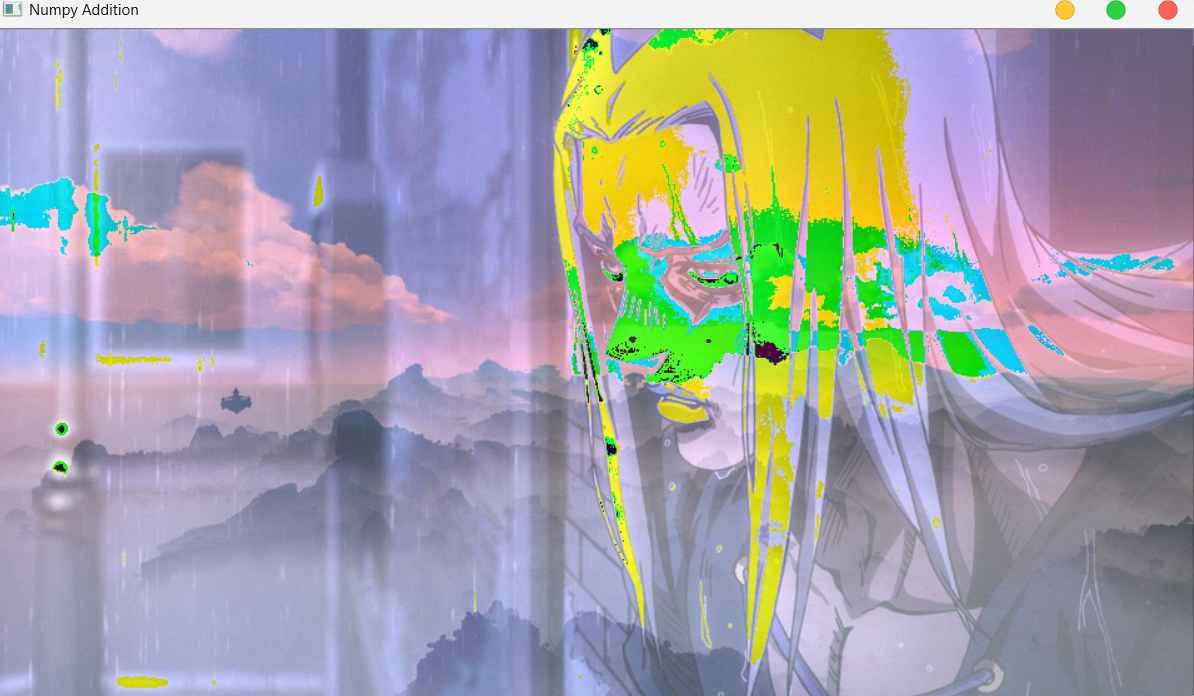
Numpy加法
很明显直接相加的话图像直接失真了。
result = img1 + img2import cv2
# 读取两张相同尺寸的图像
img1 = cv2.imread("image1.jpg") # 替换为你的图片路径
img2 = cv2.imread("image2.jpg") # 替换为你的图片路径
# 检查图像是否成功读取
if img1 is None or img2 is None:
print("错误:无法读取图像文件")
exit()
# 调整img2尺寸匹配img1
if img1.shape != img2.shape:
img2 = cv2.resize(img2, (img1.shape[1], img1.shape[0])) # 注意宽高顺序
# 直接相加
result = img1 + img2
# 显示结果
cv2.imshow("Numpy Addition", result)
cv2.waitKey(0)
cv2.destroyAllWindows()
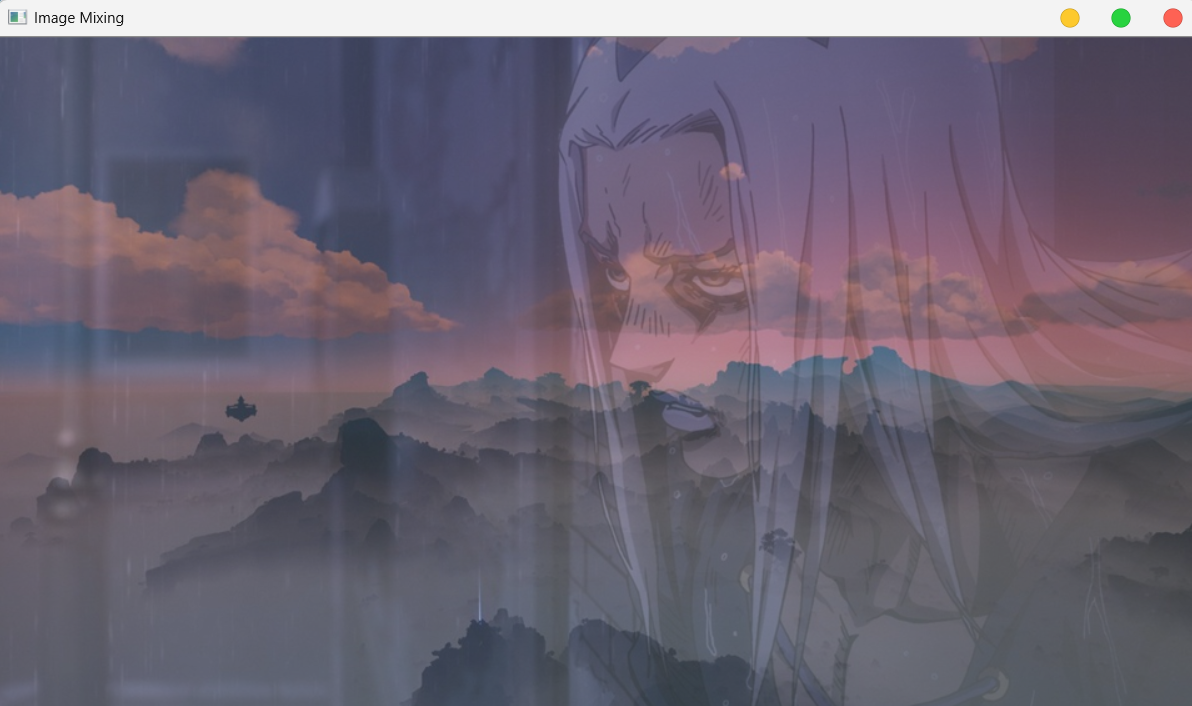
图像的混合
# cv2.addWeighted() 是 OpenCV 中最重要和最常用的图像处理函数之一,用于实现图像的加权混合(也称为alpha混合)。
# dst = src1 × alpha + src2 × beta + gamma
dst = cv2.addWeighted(src1, alpha, src2, beta, gamma[, dst[, dtype]])| 参数 | 类型 | 描述 | 默认值 | 重要说明 |
|---|---|---|---|---|
src1 |
numpy.ndarray | 第一个输入图像(矩阵) | 必填 | 支持多通道图像(如BGR彩色图) |
alpha |
float | 第一个图像的权重系数 | 必填 | 通常范围0.0-1.0,但可为任意实数 |
src2 |
numpy.ndarray | 第二个输入图像(矩阵) | 必填 | 必须与src1尺寸和通道数相同 |
beta |
float | 第二个图像的权重系数 | 必填 | 通常alpha + beta = 1.0 |
gamma |
float | 添加到加权和的标量值 | 必填 | 用于亮度调整,通常为0 |
dst |
numpy.ndarray | 输出图像 | None | 可选,用于预分配输出数组 |
dtype |
int | 输出数组的深度 | -1 | 可选,如cv2.CV_8U, cv2.CV_32F |
import cv2
# 读取两张相同尺寸的图像
img1 = cv2.imread("image1.jpg") # 替换为你的图片路径
img2 = cv2.imread("image2.jpg") # 替换为你的图片路径
# 检查图像是否成功读取
if img1 is None or img2 is None:
print("错误:无法读取图像文件")
exit()
# 调整img2尺寸匹配img1
if img1.shape != img2.shape:
img2 = cv2.resize(img2, (img1.shape[1], img1.shape[0])) # 注意宽高顺序
# 图像混合
result = cv2.addWeighted(img1, 0.3, img2, 0.7, 0)
# 显示结果
cv2.imshow("Image Mixing", result)
cv2.waitKey(0)
cv2.destroyAllWindows()
几何变换
图像缩放
对图像进行放大或缩小。
resized = cv2.resize(src, dsize[, dst[, fx[, fy[, interpolation]]]])参数详解:
-
src: 输入图像 (numpy.ndarray) -
dsize: 输出图像尺寸 (tuple:(width, height)) -
fx: 水平缩放因子 (float) -
fy: 垂直缩放因子 (float) -
interpolation: 插值方法 (默认为cv2.INTER_LINEAR)
重要规则:必须指定
dsize或(fx, fy),但不能同时指定两者
插值方法对比
| 插值方法 | 枚举值 | 时间复杂度 | 质量 | 适用场景 |
|---|---|---|---|---|
| 最近邻插值 | cv2.INTER_NEAREST |
O(1) | 低 | 像素艺术、实时处理 |
| 双线性插值 | cv2.INTER_LINEAR |
O(4) | 中 | 默认选择,平衡速度质量 |
| 双三次插值 | cv2.INTER_CUBIC |
O(16) | 高 | 高质量放大,照片处理 |
| 区域插值 | cv2.INTER_AREA |
O(1) | 中高 | 缩小图像首选 |
| Lanczos插值 | cv2.INTER_LANCZOS4 |
O(64) | 极高 | 专业级放大,医学影像 |
绝对尺寸
resized = cv2.resize(img, (400, 300))相对尺寸
# 缩小为原图的50%
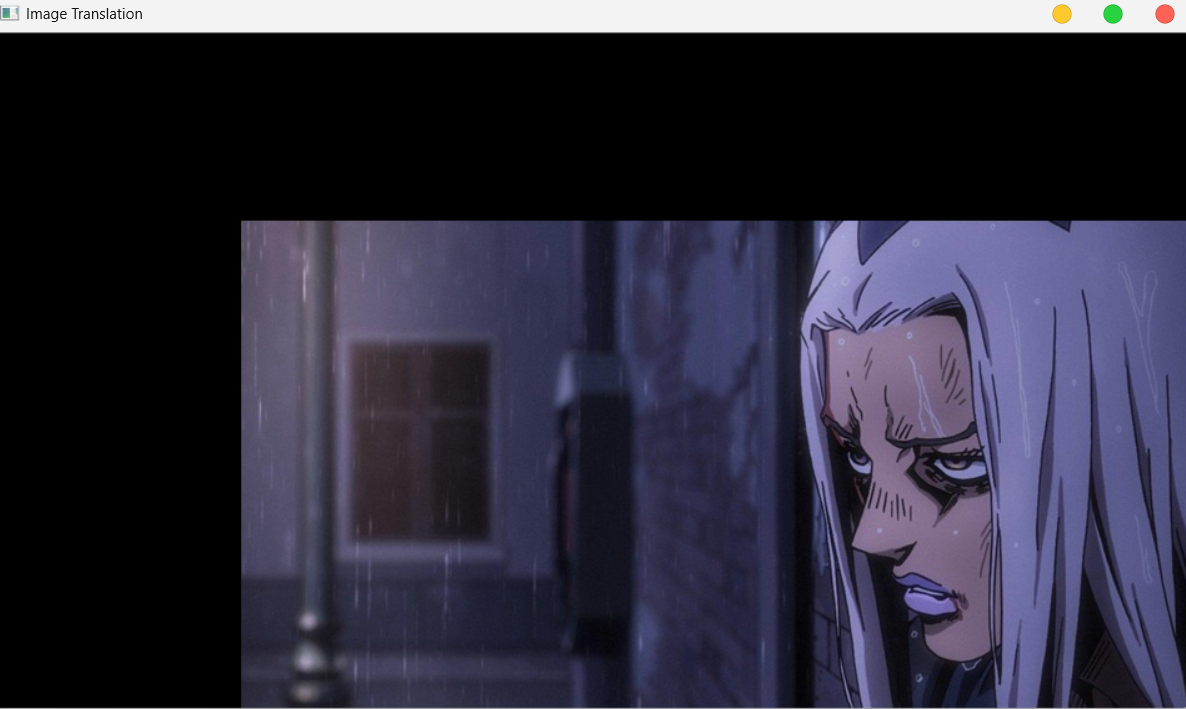
half_size = cv2.resize(img, None, fx=0.5, fy=0.5)图像平移
指定平移矩阵后,调用cv.warpAffine()平移图像。
dst = cv2.warpAffine(
src,
M,
dsize,
dst=None,
flags=cv2.INTER_LINEAR,
borderMode=cv2.BORDER_CONSTANT,
borderValue=0
)必需参数
| 参数 | 类型 | 描述 |
|---|---|---|
src |
numpy.ndarray | 输入图像 (单通道或多通道) |
M |
numpy.ndarray (2×3) | 2×3仿射变换矩阵 |
dsize |
tuple | 输出图像尺寸 (width, height) |
可选参数
| 参数 | 类型 | 默认值 | 描述 |
|---|---|---|---|
dst |
numpy.ndarray | None | 输出图像数组 (预分配内存) |
flags |
int | cv2.INTER_LINEAR | 插值方法 |
borderMode |
int | cv2.BORDER_CONSTANT | 边界填充模式 |
borderValue |
scalar | 0 | 边界填充值 (BORDER_CONSTANT时使用) |
M仿射变换矩阵
M = [ a11 a12 b1 ]
[ a21 a22 b2 ]变换类型与矩阵关系
| 变换类型 | 矩阵公式 | 说明 |
|---|---|---|
| 平移 | [[1, 0, tx], [0, 1, ty]] |
tx, ty 为平移量 |
| 旋转 | cv2.getRotationMatrix2D(center, angle, scale) |
中心点、角度、缩放 |
| 缩放 | [[sx, 0, 0], [0, sy, 0]] |
sx, sy 为缩放因子 |
| 倾斜 | [[1, shx, 0], [shy, 1, 0]] |
shx, shy 为倾斜因子 |
| 组合变换 | M = M1 × M2 | 矩阵乘法组合多个变换 |
import cv2
import numpy as np
# 读取两张相同尺寸的图像
img = cv2.imread("image1.jpg") # 替换为你的图片路径
# 检查图像是否成功读取
if img is None:
print("错误:无法读取图像文件")
exit()
# x移动200px,y移动150px
M = np.float32([[1, 0, 200], [0, 1, 150]]) # 平移矩阵
result = cv2.warpAffine(img, M, (img.shape[1], img.shape[0]))
# 显示结果
cv2.imshow("Image Translation", result)
cv2.waitKey(0)
cv2.destroyAllWindows()
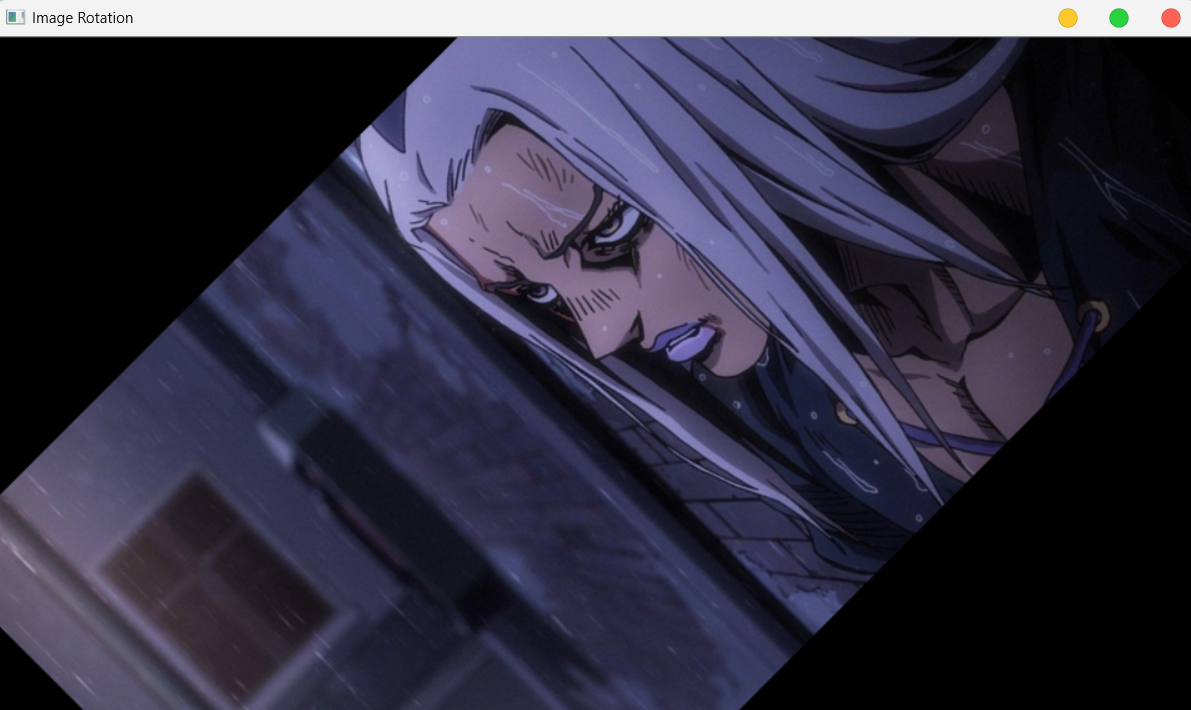
图像旋转
调用cv.getRotationMatrix2D获取旋转矩阵,然后调用cv.warpAffine()进行旋转。
# 生成旋转矩阵
retval = cv2.getRotationMatrix2D(center, angle, scale)| 参数 | 类型 | 描述 |
|---|---|---|
center |
tuple (x, y) | 旋转中心点坐标 |
angle |
float | 旋转角度(度),逆时针为正 |
scale |
float | 缩放比例 (1.0 = 保持原大小) |
返回值:retval: 2×3 仿射变换矩阵 (numpy.ndarray, dtype=float64)
此时M:[[ 0.70710678 0.70710678 -50.33008589]
[ -0.70710678 0.70710678 418.49242405]]
import cv2
# 读取两张相同尺寸的图像
img = cv2.imread("image1.jpg") # 替换为你的图片路径
# 检查图像是否成功读取
if img is None:
print("错误:无法读取图像文件")
exit()
# 旋转中心,旋转角度,缩放因子
M = cv2.getRotationMatrix2D((img.shape[1] / 2, img.shape[0] / 2), 45, 1) # 旋转矩阵
# 进行旋转
result = cv2.warpAffine(img, M, (img.shape[1], img.shape[0]))
# 显示结果
cv2.imshow("Image Rotation", result)
cv2.waitKey(0)
cv2.destroyAllWindows()
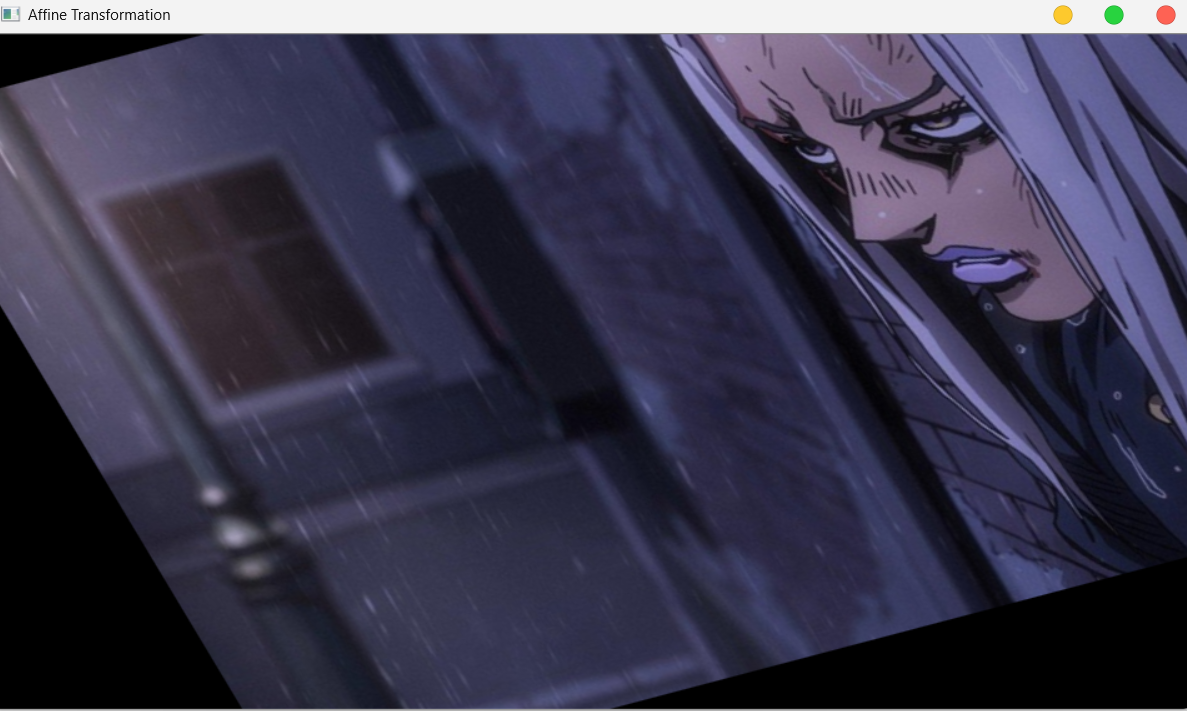
仿射变换
调用getAffineTransform将创建变换矩阵,最后该矩阵传递给cv.warpAffine()进行变换。
- 如果两条线在变换前平行,变换后仍然平行。
- 位于同一直线上的点在变换后仍然位于同一直线上。
- 直线上点的比例关系在变换后保持不变。如果点C位于A和B之间,且AC:CB = m:n,则变换后这个比例关系仍然成立。
# 通过三对对应点建立源图像与目标图像之间的几何映射关系
M = cv2.getAffineTransform(src, dst)| 参数 | 类型 | 描述 |
|---|---|---|
src |
numpy.ndarray (3×2) | 源图像中的三个点坐标 (float32) |
dst |
numpy.ndarray (3×2) | 目标图像中的三个对应点坐标 (float32) |
返回值:M: 2×3 仿射变换矩阵 (numpy.ndarray, dtype=float64)
此时M:[[ 1.26666667 0.6 -83.33333333]
[ -0.33333333 1. 66.66666667]]
import cv2
import numpy as np
# 读取两张相同尺寸的图像
img = cv2.imread("image1.jpg") # 替换为你的图片路径
# 检查图像是否成功读取
if img is None:
print("错误:无法读取图像文件")
exit()
# 定义源图像和目标图像的顶点
pts1 = np.float32([[50, 50], [200, 50], [50, 200]])
pts2 = np.float32([[10, 100], [200, 50], [100, 250]])
# 计算仿射变换矩阵
M = cv2.getAffineTransform(pts1, pts2)
# 进行仿射变换
result = cv2.warpAffine(img, M, (img.shape[1], img.shape[0]))
# 显示结果
cv2.imshow("Affine Transformation", result)
cv2.waitKey(0)
cv2.destroyAllWindows()
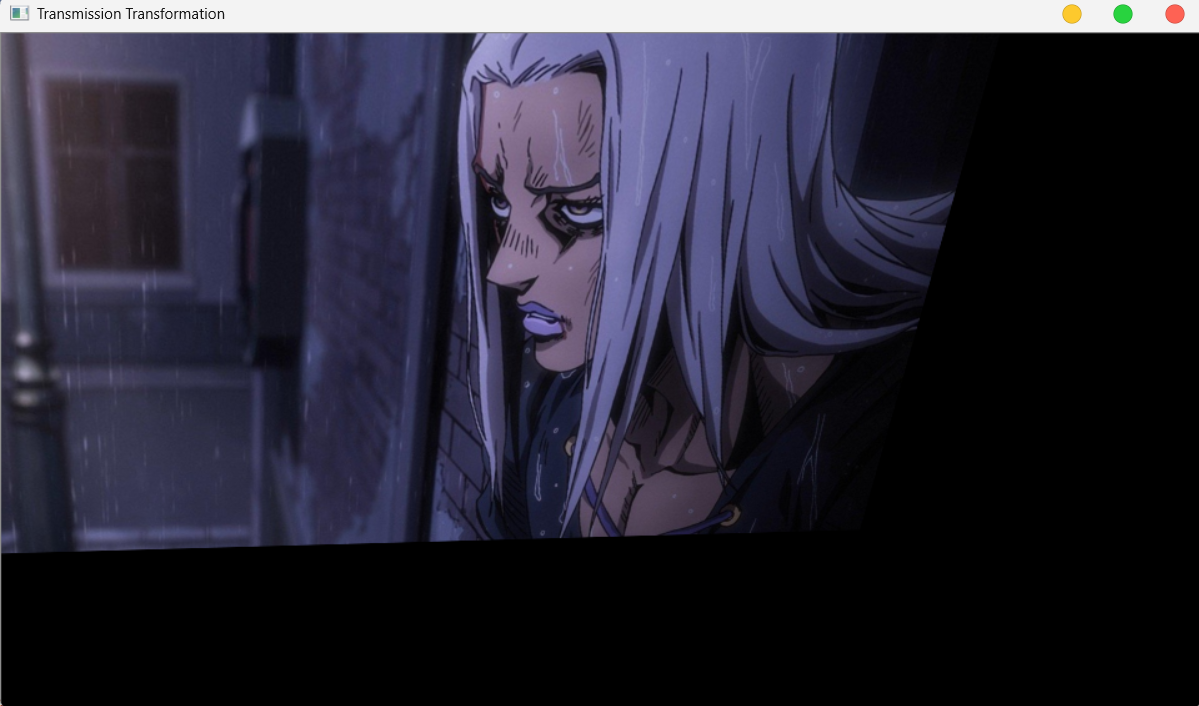
透射变换
通过函数getPerspectiveTransform()找到变换矩阵,将cv.warpPerspective()进行投射变换。
M = cv2.getPerspectiveTransform(src, dst[, solveMethod])| 参数 | 类型 | 描述 |
|---|---|---|
src |
numpy.ndarray (4×2) | 源图像中的四个点坐标 (float32) |
dst |
numpy.ndarray (4×2) | 目标图像中的四个对应点坐标 (float32) |
solveMethod |
int | 矩阵求解方法 (默认 DECOMP_LU) |
此时T:[[ 1.05587376e+00 9.18151097e-02 -6.50969128e+01]
[ 4.69010049e-02 1.12562412e+00 -7.57920240e+01]
[ 1.83251448e-04 5.13337001e-04 1.00000000e+00]]
dst = cv2.warpPerspective(
src,
M,
dsize,
dst=None,
flags=cv2.INTER_LINEAR,
borderMode=cv2.BORDER_CONSTANT,
borderValue=0
)| 参数 | 类型 | 描述 | 默认值 |
|---|---|---|---|
src |
numpy.ndarray | 输入图像 (单通道或多通道) | - |
M |
numpy.ndarray (3×3) | 透视变换矩阵 (单应性矩阵) | - |
dsize |
tuple | 输出图像尺寸 (width, height) |
- |
dst |
numpy.ndarray | 输出图像 (预分配内存) | None |
flags |
int | 插值方法 + 可选标志 | INTER_LINEAR |
borderMode |
int | 边界处理模式 | BORDER_CONSTANT |
borderValue |
scalar | 边界填充值 | 0 |
import cv2
import numpy as np
# 读取两张相同尺寸的图像
img = cv2.imread("image1.jpg") # 替换为你的图片路径
# 检查图像是否成功读取
if img is None:
print("错误:无法读取图像文件")
exit()
# 透视变换
# 定义源点
pts1=np.float32([[56, 65], [368, 52], [28, 387], [389, 390]])
# 定义目标点
pts2=np.float32([[0, 0], [300, 0], [0, 300], [300, 300]])
# 获取透视变换矩阵
T=cv2.getPerspectiveTransform(pts1, pts2)
result = cv2.warpPerspective(img, T, (img.shape[1], img.shape[0]))
# 显示结果
cv2.imshow("Transmission Transformation", result)
cv2.waitKey(0)
cv2.destroyAllWindows()
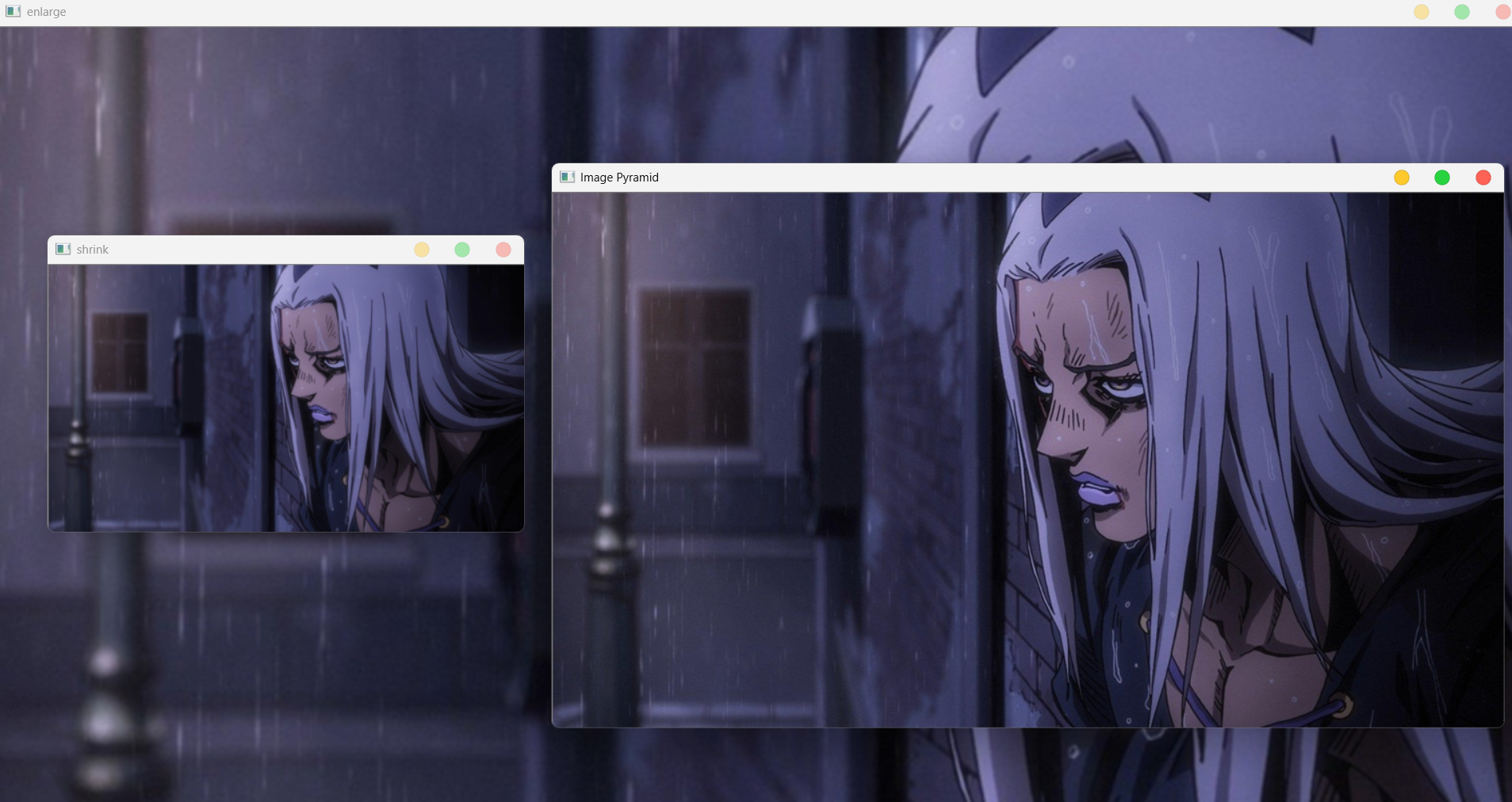
图像金字塔
向上采样:cv.pyrUp()
向下采样:cv.pyrDown()
dst = cv2.pyrUp(
src,
dst=None,
dstsize=None,
borderType=cv2.BORDER_DEFAULT
)
dst = cv2.pyrDown(
src,
dst=None,
dstsize=None,
borderType=cv2.BORDER_DEFAULT
)| 参数 | 类型 | 描述 | 默认值 |
|---|---|---|---|
src |
numpy.ndarray | 输入图像 | - |
dst |
numpy.ndarray | 输出图像 (可选) | None |
dstsize |
tuple | 输出图像大小 (width, height) |
None |
borderType |
int | 边界填充类型 | cv2.BORDER_DEFAULT |
import cv2
import numpy as np
# 读取两张相同尺寸的图像
img = cv2.imread("image1.jpg") # 替换为你的图片路径
# 检查图像是否成功读取
if img is None:
print("错误:无法读取图像文件")
exit()
up_img = cv2.pyrUp(img) # 上采样
down_img = cv2.pyrDown(img) # 下采样
# 显示结果
cv2.imshow("enlarge", up_img)
cv2.imshow("Image Pyramid", img)
cv2.imshow("shrink", down_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
| 特性 | 图像金字塔 | 图像缩放 |
|---|---|---|
| 目的 | 创建多尺度表示用于特征分析 | 改变图像尺寸以适应特定需求 |
| 输出 | 一组不同尺度的图像序列 | 单一尺寸的图像 |
| 数学基础 | 高斯平滑+下采样/上采样 | 插值算法 |
| 可逆性 | 不可逆(信息损失) | 部分可逆(取决于算法) |
| 典型应用 | 多尺度特征检测、图像融合 | 显示适配、预处理、存储优化 |
| OpenCV函数 | pyrUp(), pyrDown() |
resize() |

GitCode 天启AI是一款由 GitCode 团队打造的智能助手,基于先进的LLM(大语言模型)与多智能体 Agent 技术构建,致力于为用户提供高效、智能、多模态的创作与开发支持。它不仅支持自然语言对话,还具备处理文件、生成 PPT、撰写分析报告、开发 Web 应用等多项能力,真正做到“一句话,让 Al帮你完成复杂任务”。
更多推荐



 18
18 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)