
上海AI实验室无人机视觉语言导航最新基准!OpenFly:空中VLN的全能工具链与大规模测试基准
论文提出了OpenFly平台,用于大规模数据收集和室外空中VLN任务。OpenFly集成了多种渲染引擎,生成了多样且高质量的数据。提出的OpenFly-Agent模型在多个评估指标上表现优异,验证了其有效性,并为未来的空中导航研究提供了一个全面的基准。本文仅做学术分享。
主要贡献
-
论文开发了自动化工具链OpenFly,用于生成空中视觉语言导航的数据,集成了多种渲染引擎,能够高效地生成多样化和高质量的数据。
-
构建了包含10万个轨迹的大规模空中视觉语言导航数据集,覆盖了18个不同的场景,提供了丰富的环境多样性。
-
提出了基于关键帧感知的空中视觉语言导航模型OpenFly-Agent,能够有效地处理视觉冗余并提高导航性能。
-
通过广泛的实验,验证了所提方法和数据集的有效性,并建立了空中视觉语言导航任务的基准,展示了其在多个任务上的优越性能。

研究背景
1. 研究问题
室内视觉语言导航(VLN)已经被广泛研究,而室外空中VLN仍然是一个未被充分探索的领域。
主要原因在于室外空中视野覆盖范围广,数据收集更具挑战性,导致缺乏基准数据集。
因此,论文主要解决的问题是如何在室外空中环境中进行VLN。
2. 研究难点
该问题的研究难点包括:
-
数据多样性不足、数据收集效率低、数据规模小;
-
现有的方法依赖于AirSim和Unreal Engine(UE),限制了数据的多样性;
-
数据收集过程依赖飞行员操作无人机并在模拟器中进行手动标注,效率低下且难以扩展;
-
当前的数据集规模较小,仅有约10k条轨迹,远不及其他领域的数据集。
3. 相关工作
-
模拟器用于具身AI:
-
介绍了多种用于具身AI研究的模拟器,如MuJoCo、Habitat、PyBullet、Matterport3D、OpenAI Gym和Isaac Gym。
-
这些模拟器主要用于室内机器人操作和导航,而不适合空中视觉语言导航(VLN)任务。
-
Gazebo和AirSim是常用的无人机模拟器,但存在兼容性和维护问题。
-
-
视觉语言导航数据集:
-
回顾了多个VLN数据集,包括R2R、RxR、TouchDown、REVERIE、CVDN等,这些数据集主要用于室内或地面导航。
-
最近的研究开始关注空中VLN,如ANDH和CityNav,它们分别使用鸟瞰图像和地理信息来辅助导航。
-
-
视觉语言导航方法:
-
讨论了VLN方法的进展,包括基于图的方法和LLM驱动的方法。
-
这些方法在连续环境中进行导航时面临挑战,特别是在空中VLN任务中,研究者提出了前瞻性引导和空间推理技术来应对这些问题。
-
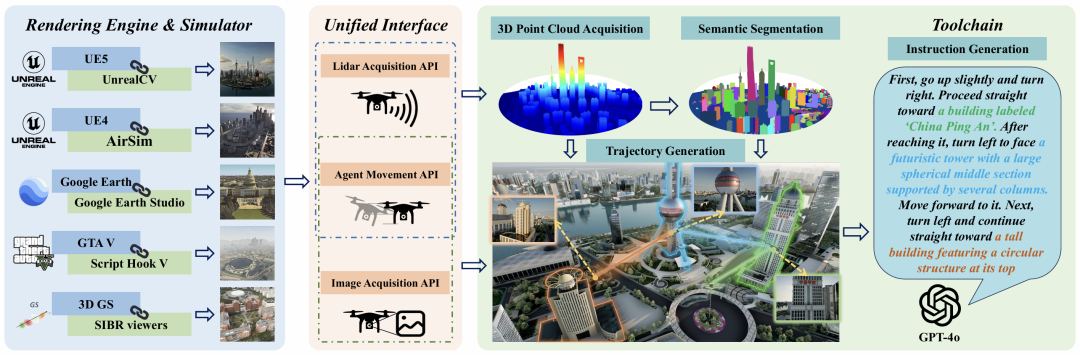
OPENFLY数据生成平台
该平台通过集成多个模拟器和设计工具链来实现自动化的数据生成。
模拟器和数据资源
为了收集高质量和现实的模拟数据,平台从多个渲染引擎和模拟器中获取数据。具体包括:
-
Unreal Engine + AirSim/UnrealCV:
-
Unreal Engine(UE)提供高度真实的交互式虚拟环境。
-
平台使用UE5和UE4中的多个场景,涵盖多种城市景观和建筑风格。
-
AirSim是一个开源的无人机模拟器,通过UnrealCV插件与UE4集成,用于从无人机视角获取图像数据。
-
-
GTA V + Script Hook V:
-
GTA V是一个开放世界的游戏,提供高度真实和动态的虚拟环境。
-
通过Script Hook V库,平台能够控制虚拟代理以收集所需的数据。
-
-
Google Earth:
-
Google Earth软件结合卫星图像、航空照片和GIS数据,提供四个城市场景。
-
Google Earth Studio用于创建自定义视频,自动绘制飞行轨迹。
-
-
3D Gaussian Splatting:
-
3D GS是一种高度真实的重建方法,适用于渲染大规模区域。
-
平台使用该方法重建五个大学校园的场景,并通过SIBR viewers进行可视化。
-

自动数据收集工具链
为了实现自动化数据生成,平台设计了三个统一的接口和一个工具链,包括:
-
统一接口:
-
Agent Movement Interface:设计了一个坐标转换模块,统一所有模拟器的坐标系统。
-
Lidar Data Acquisition Interface:集成不同的点云数据获取方法,确保数据对齐。
-
Image Acquisition Interface:整合HTTP RESTful和TCP/IP协议,允许从任意位置获取图像数据。
-
-
3D点云获取:提供两种方法来重建整个场景的点云地图,包括栅格化采样重建和基于图像的稀疏重建。
-
场景语义分割:对四种类型的模拟场景进行语义分割,使用3D场景理解、点云投影和轮廓提取等方法。
-
自动轨迹生成:利用点云图和分割工具生成无碰撞的轨迹,采用A*路径搜索算法和基于网格的路径搜索方法。
-
自动指令生成:提出了一种基于大模型(VLM)的高度自动化的语言指令生成方法,减少手动标注的成本并提高数据集的可扩展性。
质量控制
平台还包括数据过滤和指令优化步骤,以确保数据质量和一致性:
-
数据过滤:移除损坏或低质量的图像,排除无人机穿过树木模型的轨迹,以及去除过短或过长的轨迹。
-
指令优化:使用NLTK库简化指令,检测并合并相似描述,减少冗余信息。
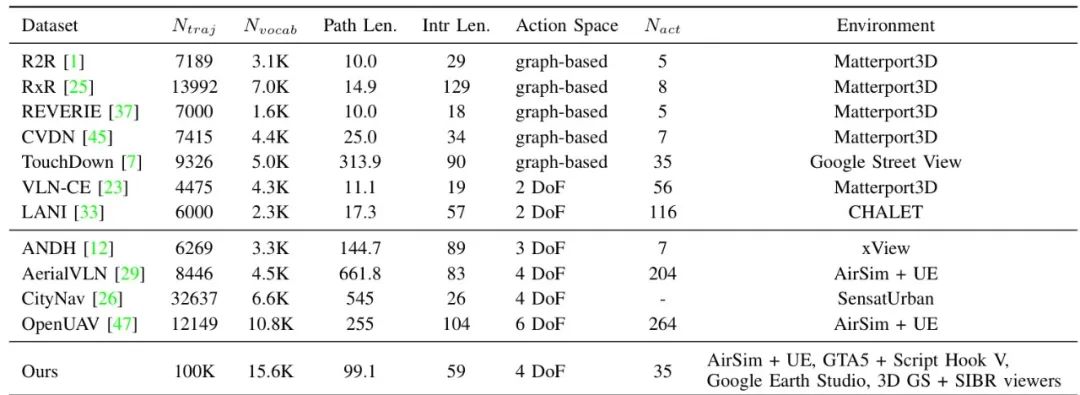
数据集分析
概述
OpenFly数据集通过工具链收集了10万个轨迹,每个轨迹都配有相应的图像序列和语言指令。数据生成过程中设定了最小运动步长为3米,以产生更细粒度的轨迹。数据集的特点包括:
-
轨迹数量:显著多于现有的VLN数据集。
-
词汇量:拥有更大的词汇量,提供了更丰富的指令描述。
-
环境多样性:涵盖了多种不同的场景和环境。
-
轨迹长度和指令长度:平均轨迹长度和指令长度相对较短,旨在符合人类用户的实际使用习惯。
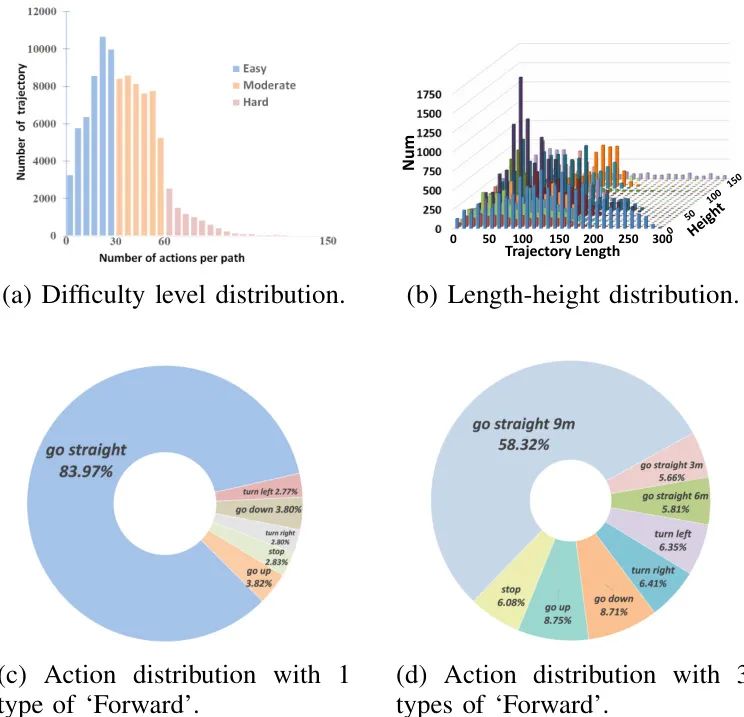
轨迹分析
除了丰富的场景多样性,数据集还努力在轨迹的难度级别、长度和高度上实现多样化:
-
难度级别:根据轨迹中的动作数量将轨迹分类为“简单”、“中等”和“困难”。例如,少于30个动作的轨迹被归类为“简单”。
-
轨迹长度和高度:轨迹长度范围从0到300米,飞行高度从0到150米不等。这种广泛的分布有助于训练模型应对不同复杂度的任务。
-
动作分布:在大型户外场景中,前进动作的比例自然较高。为了缓解模型对主导动作的过度拟合,将“前进”动作分为三种粒度(3米、6米和9米),并在轨迹中合并连续的“前进”动作。
OPENFLY-AGENT
介绍了OpenFly-Agent的设计、架构及其在视觉语言导航(VLN)任务中的应用。
1. 数据集划分
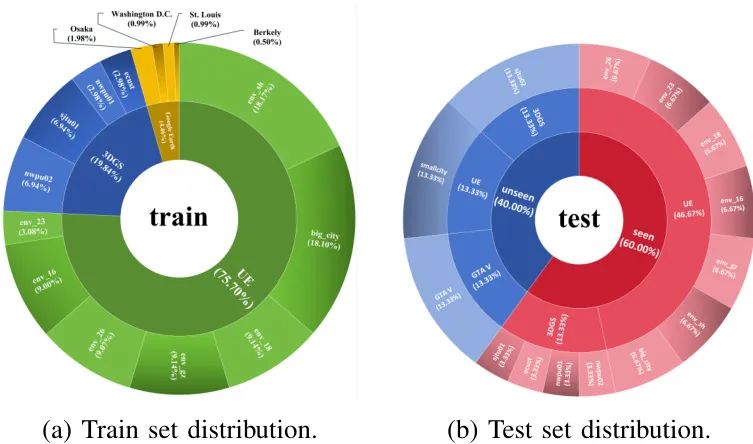
数据集被划分为三个部分,以便在不同的数据子集上评估模型的性能:
-
训练集(Train):
-
主要用于模型的训练。训练集包含来自多个场景的轨迹,其中大部分来自Unreal Engine,因为它提供了最多的场景。
-
具体的轨迹数量根据场景的面积进行采样,以确保数据集的平衡性。
-
-
测试可见集(Test-seen):
-
用于评估模型在已知场景中的表现。测试可见集包含从训练集中未使用的场景中均匀采样的轨迹。
-
这样可以确保模型在未见过的场景中进行测试时,仍能表现出色。
-
-
测试不可见集(Test-unseen):
-
用于评估模型的泛化能力。测试不可见集包含从未在训练集中出现过的场景中的轨迹。
-
这有助于验证模型在新场景中的适应性和鲁棒性。
-
2. 问题定义
-
在视觉语言导航任务中,无人机的初始位置和姿态被随机设定在一个3D环境中。
-
无人机通过其自带的摄像头感知周围环境,并根据自然语言指令进行导航。
-
任务的目标是预测下一个导航动作,这些动作可以是前进、转向、上升、下降或停止。
3. 模型架构
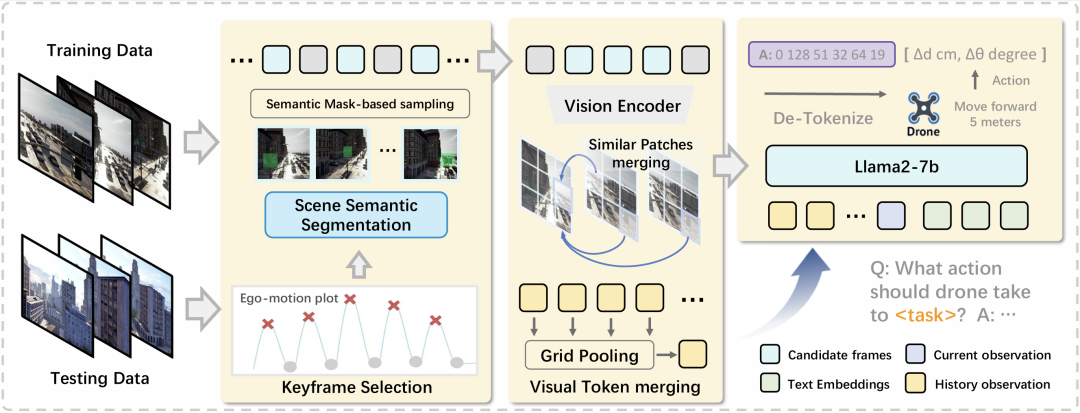
OpenFly-Agent基于OpenVLA模型进行扩展和改进,采用了端到端的架构。主要特点包括:
-
关键帧选择:
-
为了减少视觉冗余并保持关键信息,模型采用关键帧选择策略。
-
通过检测无人机的运动变化点来识别关键帧,确保包含关键地标的信息。
-
具体来说,模型通过绘制无人机的轨迹曲线,并在波峰附近选择帧作为候选关键帧。
-
然后,使用场景分割图来检测关键地标,确保选定的帧包含重要的导航信息。
-
-
视觉token合并:
-
为了减少计算负担,模型采用视觉token合并策略。
-
通过计算参考图像和后续图像之间的相似性,合并相似的视觉token。
-
具体来说,模型在每个关键帧集合中选择一个参考帧,并计算其与后续帧之间的余弦相似性。
-
相似的视觉token通过平均处理进行合并,以减少冗余信息。
-
-
动作预测:
-
模型定义了六种无人机动作:前进、左转、右转、上升、下降和停止。
-
每种动作被离散化为多个区间,模型输出映射到每个动作类型的区间,以预测飞行动作。
-
具体来说,“前进”动作有三个不同的单位(3米、6米和9米),而“左转”和“右转”的单位是30度,“上升”和“下降”的单位是3米。
-
实验与分析
1. 实现和训练细节
-
模型组成:
-
OpenFly-Agent由Dino-SigCLIP(224 x 224像素)作为视觉编码器和预训练的Llama-2(7B)作为语言模型组成。
-
视觉token通过投影层与文本嵌入对齐后输入到Llama-2模型中。
-
-
视觉token处理:
-
当前帧保留256个视觉token,所有历史关键帧压缩为一个token。
-
历史记忆库的容量设置为2。
-
-
动作预测:使用词汇表中最后256个特殊token表示动作,每个动作类型被离散化为多个区间,用于预测。
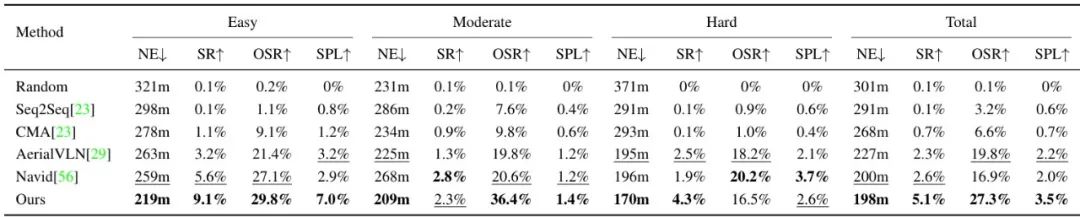
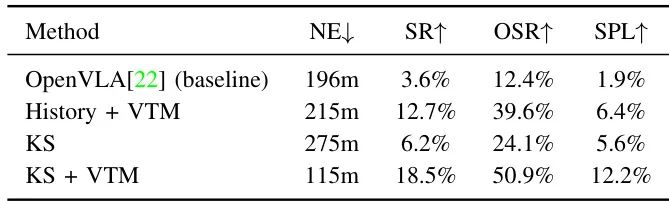
2. 评估指标
-
导航误差(NE):测量无人机最终停止点与目标位置之间的平均偏差。
-
成功率(SR):成功任务的比率,定义为无人机在目标20米范围内停止的任务比例。
-
Oracle成功率(OSR):如果轨迹上的任何点在目标20米范围内,则认为任务成功。
-
路径加权成功率(SPL):根据实际执行路径长度与目标路径长度的比例加权的成功率。
3. 结果分析

-
定量结果:在测试可见集和测试不可见集上测试OpenFly-Agent,并区分容易、中等和困难的样本。与其他VLN方法相比,OpenFly-Agent在所有难度级别上均表现出最佳性能。
-
Test-seen:OpenFly-Agent在各个难度级别上均优于其他方法,显示出强大的视觉语言导航能力。
-
Test-unseen:尽管所有方法的性能都有所下降,但OpenFly-Agent仍然表现出一定的泛化能力。
-
-
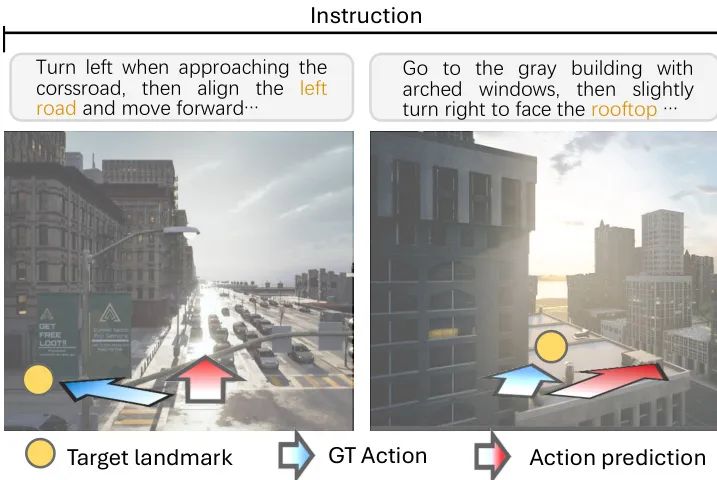
定性结果:
-
展示了OpenFly-Agent的成功导航案例和失败案例。
-
成功案例中,模型能够根据指令成功导航至目的地;
-
失败案例中,模型可能未能正确识别地标或输出错误的动作。
-
4. 消融研究
-
评估关键帧选择和视觉token合并对模型性能的影响。
-
结果表明,关键帧选择和视觉token合并策略显著提高了模型的成功率。
总结
-
论文提出了OpenFly平台,用于大规模数据收集和室外空中VLN任务。
-
OpenFly集成了多种渲染引擎,生成了多样且高质量的数据。
-
提出的OpenFly-Agent模型在多个评估指标上表现优异,验证了其有效性,并为未来的空中导航研究提供了一个全面的基准。
本文仅做学术分享

GitCode 天启AI是一款由 GitCode 团队打造的智能助手,基于先进的LLM(大语言模型)与多智能体 Agent 技术构建,致力于为用户提供高效、智能、多模态的创作与开发支持。它不仅支持自然语言对话,还具备处理文件、生成 PPT、撰写分析报告、开发 Web 应用等多项能力,真正做到“一句话,让 Al帮你完成复杂任务”。
更多推荐



 5
5 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)