
网络课程 | 使用 RFEM 6 中的人工智能(AI)进行模型优化
本手册描述了网络研讨会“RFEM 6 中人工智能 (AI) 优化模型”的主题。首先介绍如何定义全局参数。然后,这些参数将在公式中使用以确定数值。接下来,描述如何优化定义的参数。最后,展示估算成本和 CO2 排放的方法。
概述
本手册描述了网络研讨会“RFEM 6 中人工智能 (AI) 优化模型”的主题。首先介绍如何定义全局参数。然后,这些参数将在公式中使用以确定数值。接下来,描述如何优化定义的参数。最后,展示估算成本和 CO2 排放的方法。
录制的网络研讨会
常规
RFEM 6 中使用人工智能优化模型 | 2022 年 3 月 24 日,星期四
新建模型并激活模块
要创建桁架单元格,您应该创建一个 new model。 模型类型预设为' 三维'。
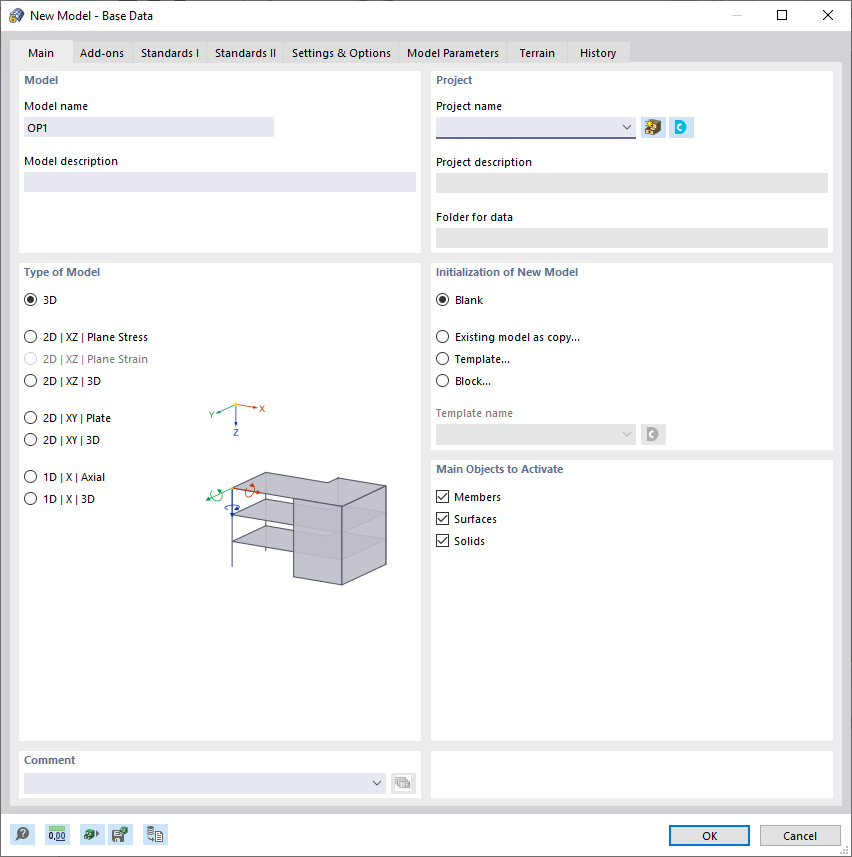
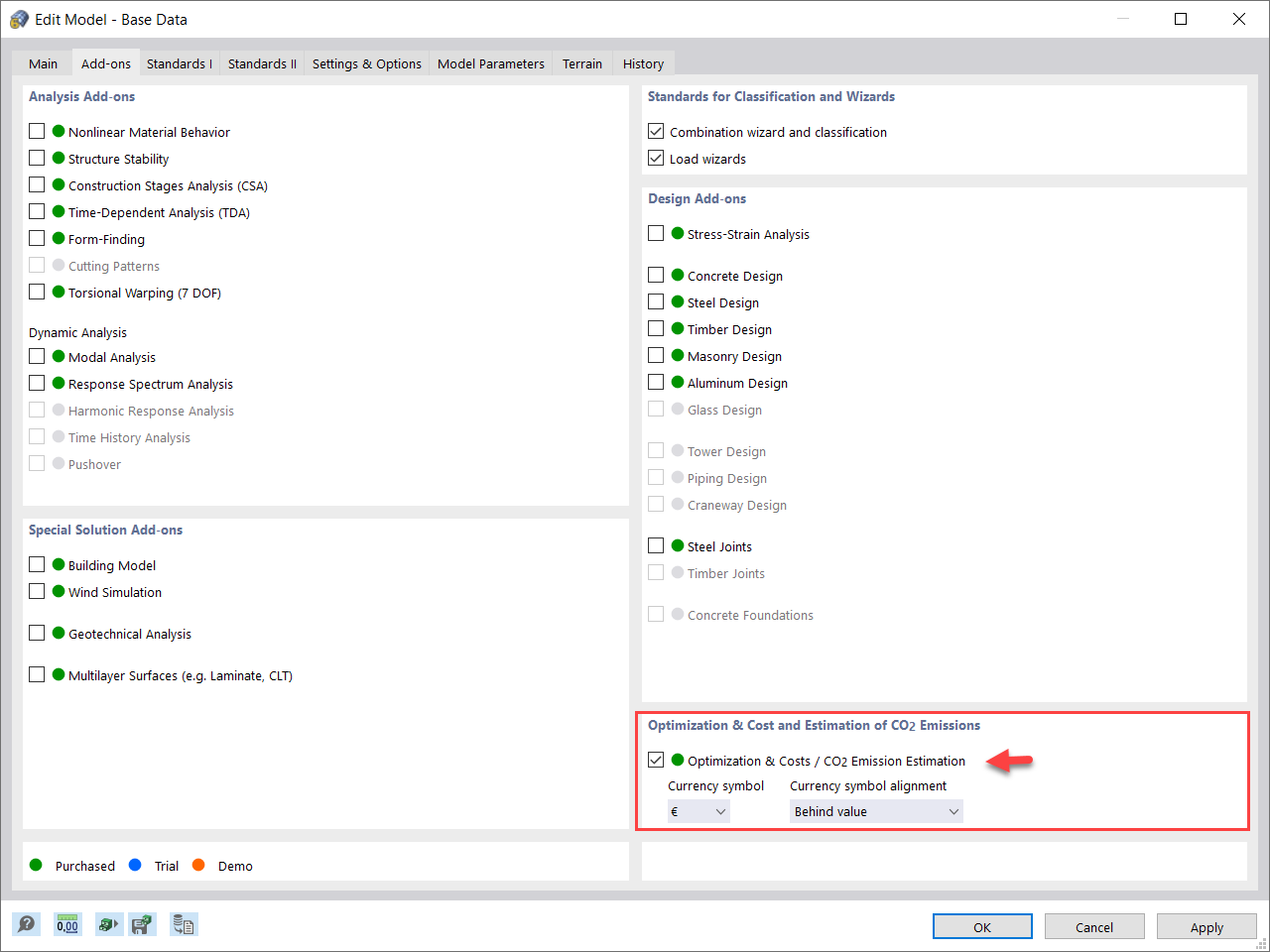
激活模块' 优化和成本/CO2排放估算'。 这个由两部分组成的模块使用粒子群优化 (PSO) 的人工智能 (AI) 方法为参数化模型和块找到合适的参数。 另一方面,该模块可以估算结构模型的成本或 CO2排放量。
模拟桁架
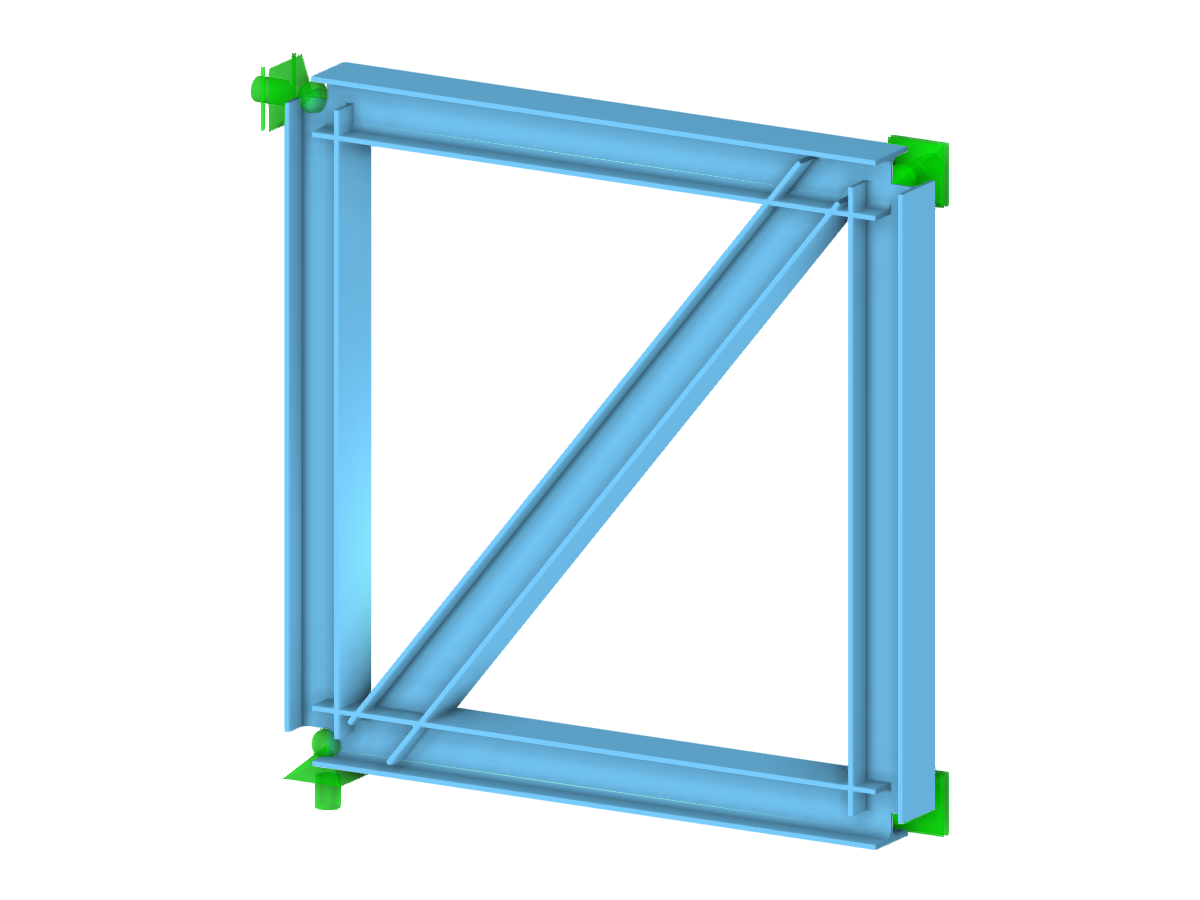
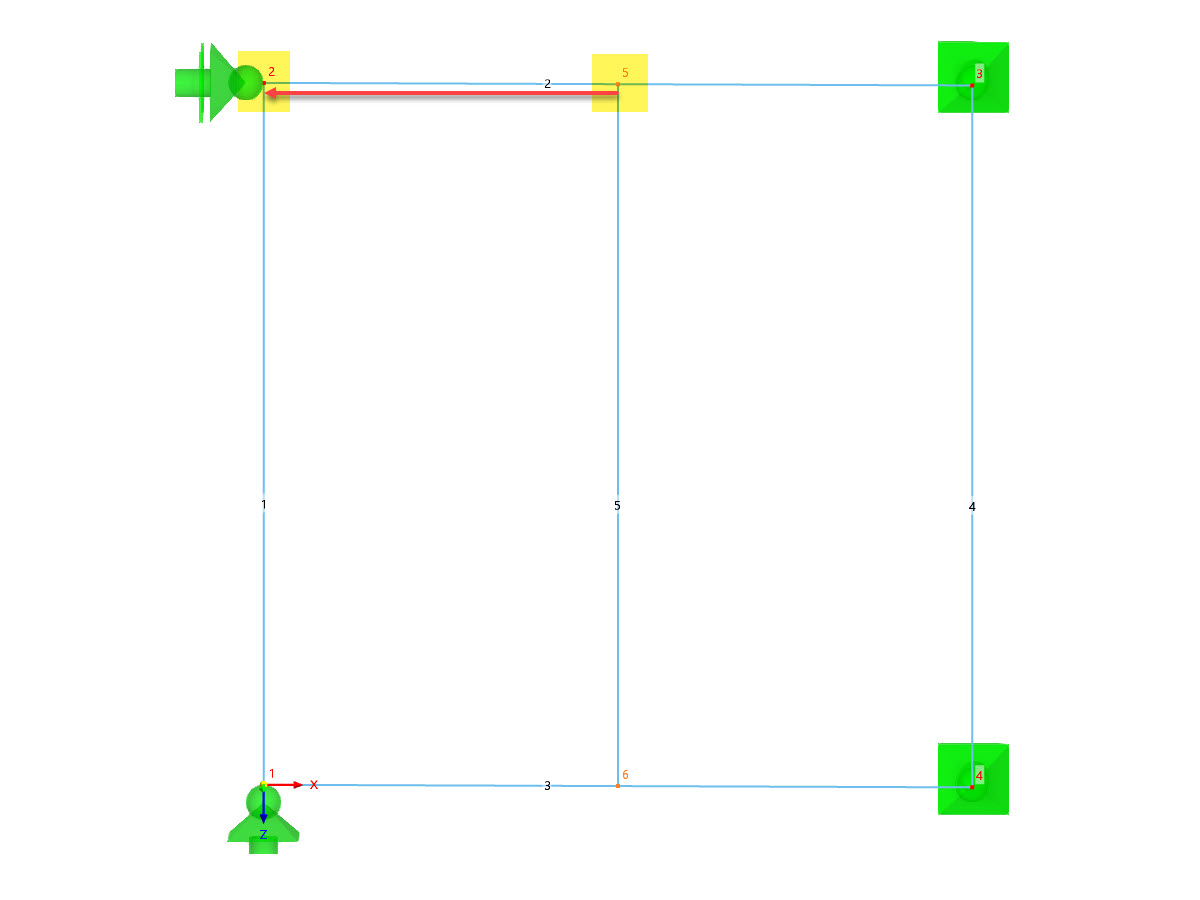
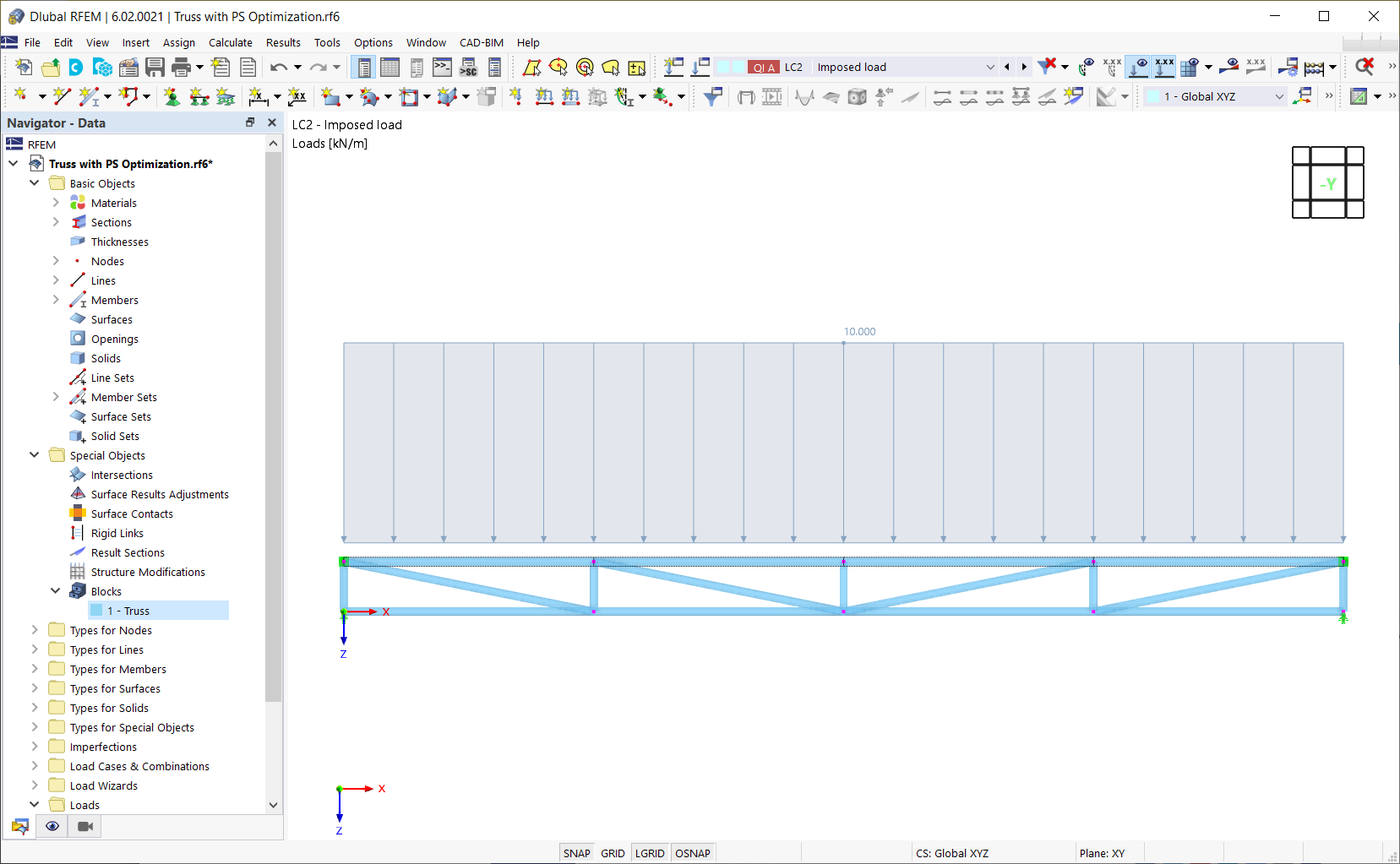
本次网络课堂的第一个模型是下图所示的桁架单元。 本章介绍了如何在 RFEM 6 中通过定义杆件和节点支座来对结构进行建模。
定义杆件
要定义杆件,请使用工具栏中的
![]()
按钮。 首先定义具有相同截面(HEA 100)和相同长度(1 m)的杆件1、2、3和4 。
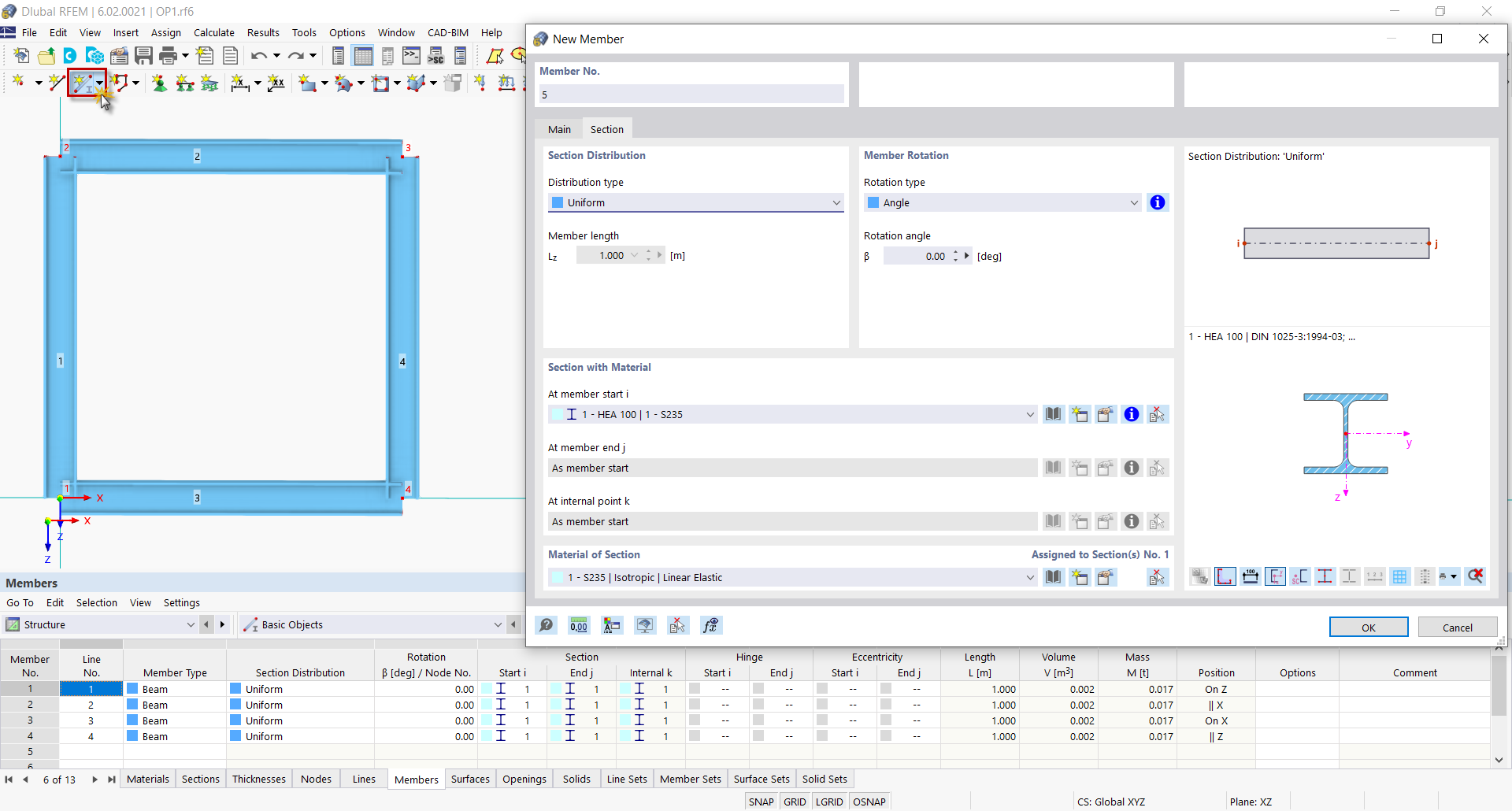
钢筋编号杆件5的钢梁首先位于上弦(杆件 2)和下弦(杆件 3)之间的中间位置。 为此,请在杆件编号 2 和杆件编号 3 上创建中间节点。 中间节点可以通过 分割线/杆件 来创建。 然后用一个与其他杆件具有相同截面(HEA 100)的新杆件(即杆件编号5)连接这些节点。
重要
如果在杆件'上分裂杆件以创建中间节点,则激活选项',在杆件'上创建类型为'的节点。 这会创建节点,但不会实际划分杆件。
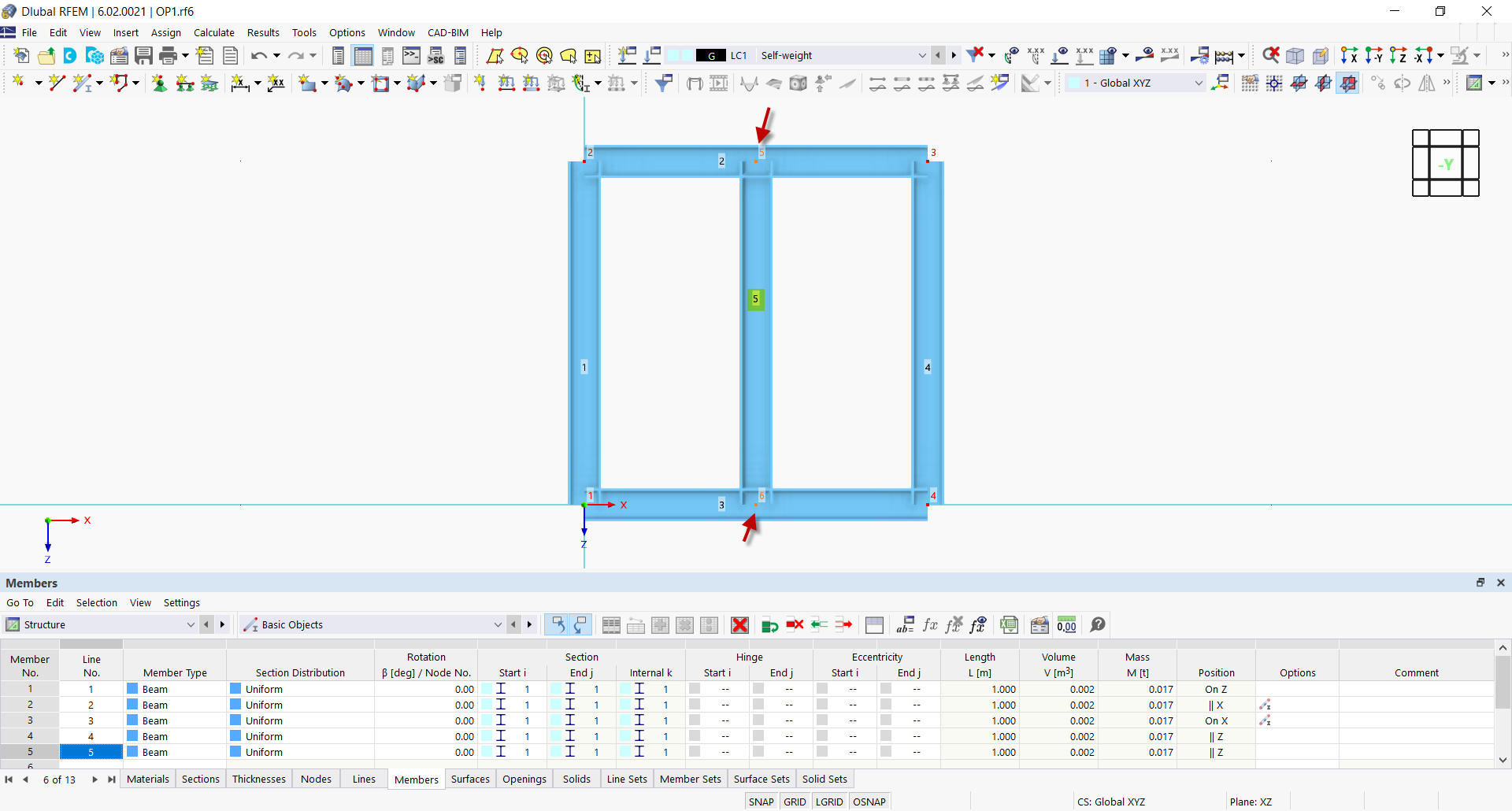
在接下来的几章中,我们将介绍如何使用参数化输入来为杆件#5找到最佳位置。
定义节点支座
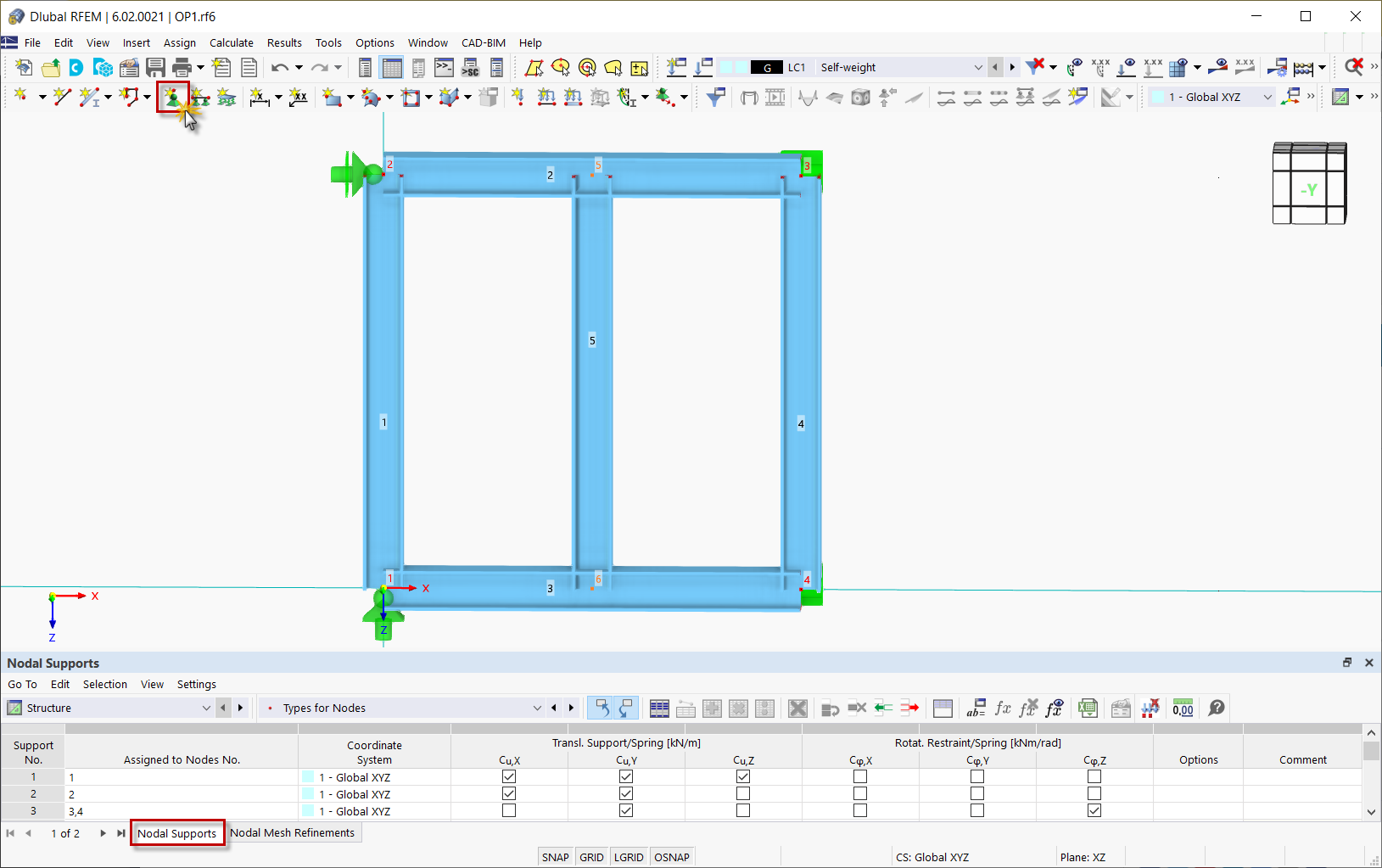
使用工具栏上的
![]()
按钮可以定义节点支座。 然后将节点支座映射到节点 1、2、3 和 4 上。 有关支座定义的详细信息,请参见'节点支座'表,该表显示在 image033145 节点支座的定义 中。
参数化模型
在 RFEM 和 RSTAB 中的一个优势产品是支持参数化输入,通过这些输入,您可以创建或使用变量调整模型。 这使得模型和荷载数据可以根据某些参数(例如长度、宽度、交通荷载等)进行定义。 这些变量也称为参数。 在程序中会以列表的形式清晰地显示它们。 您也可以使用公式中的参数来确定一个值。 如果您更改参数列表中的某个参数,那么使用该参数的所有公式的结果都会相应地调整。
本手册的这一部分介绍了如何定义全局参数以及如何使用它们,以便程序找到最佳的支撑(杆件编号 5)。 该位置由节点 5 相对于杆件 2 的位置和节点 6 相对于杆件 3 的位置来描述。
定义全局参数
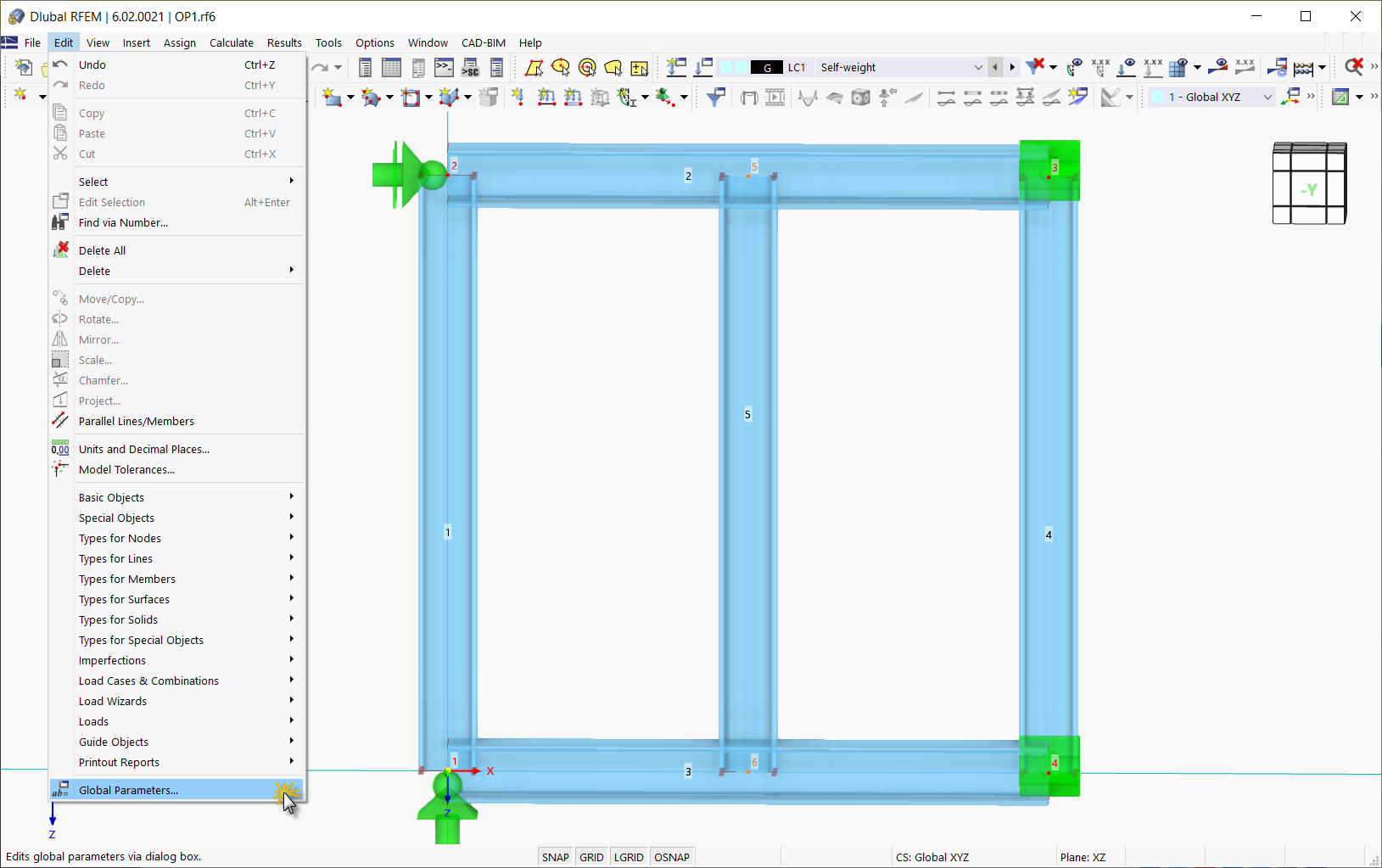
首先,您必须在程序 中定义全局参数 。 通过菜单编辑 → 全局参数可以调用全局参数列表。
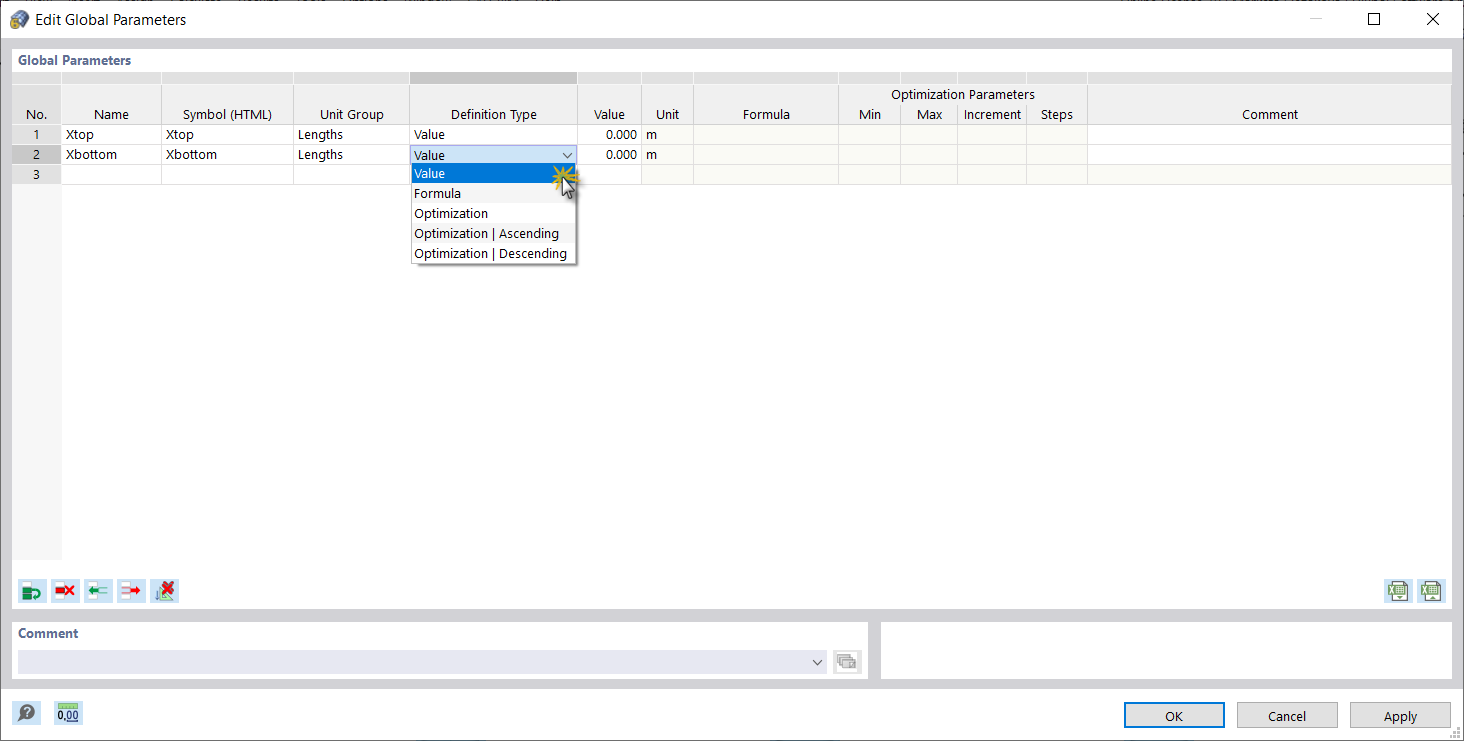
定义 两个 参数 - 一个代表上弦( Xoben ) 上节点 #5 的位置,一个代表上弦上节点 #6 的位置。下弦( Xbelow )。 由于变量定义了杆件节点和杆件起点/终点之间的距离,因此请选择单位组 长度 '。 参数最初被定义为数值。 因此要在'定义类型'列表中选择 '值 '。 将这两个参数的值定义为 0。
在公式中使用参数
现在您可以使用公式中定义的参数来定义数值。 首先用公式定义节点 5 与杆件 2 起始节点的距离。
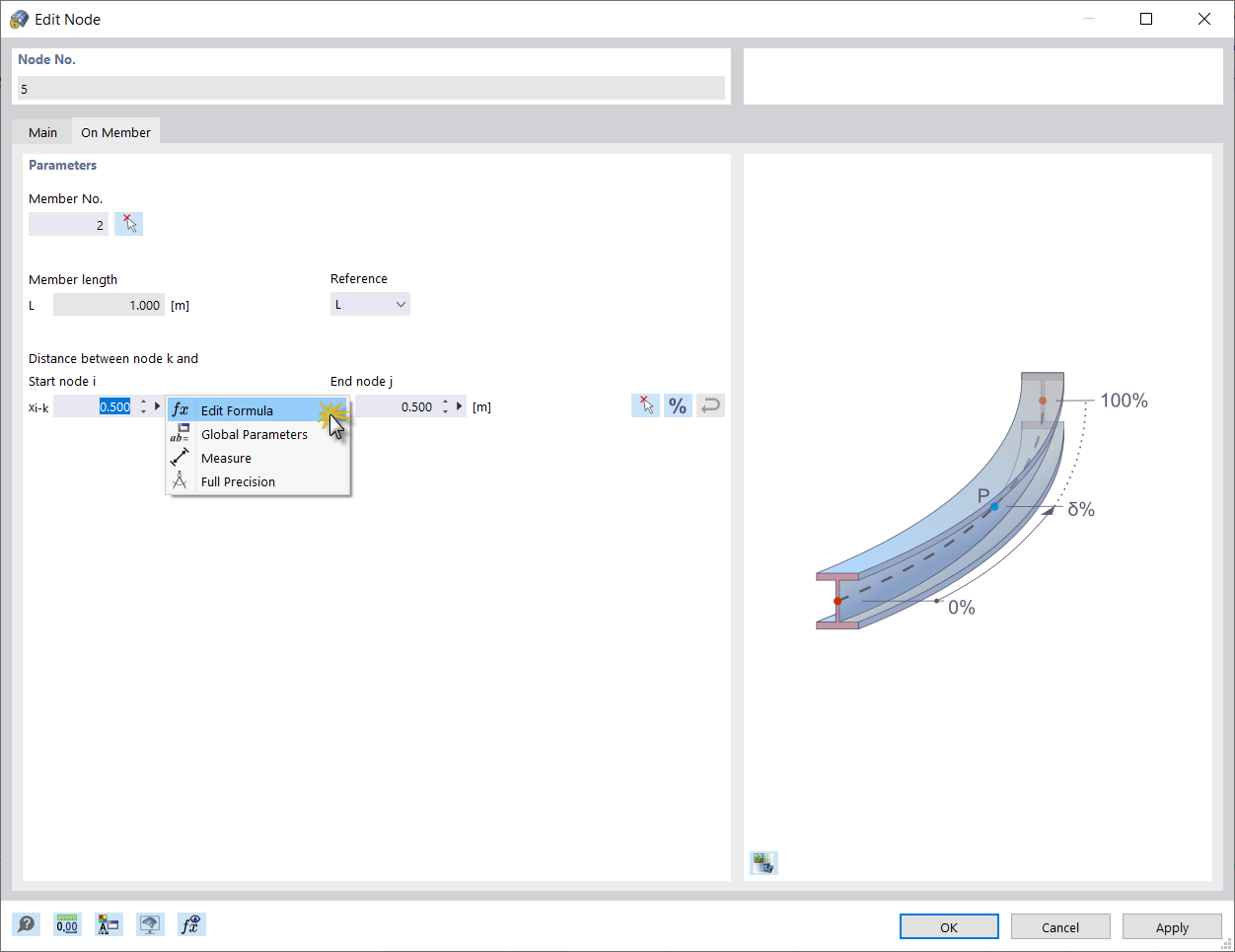
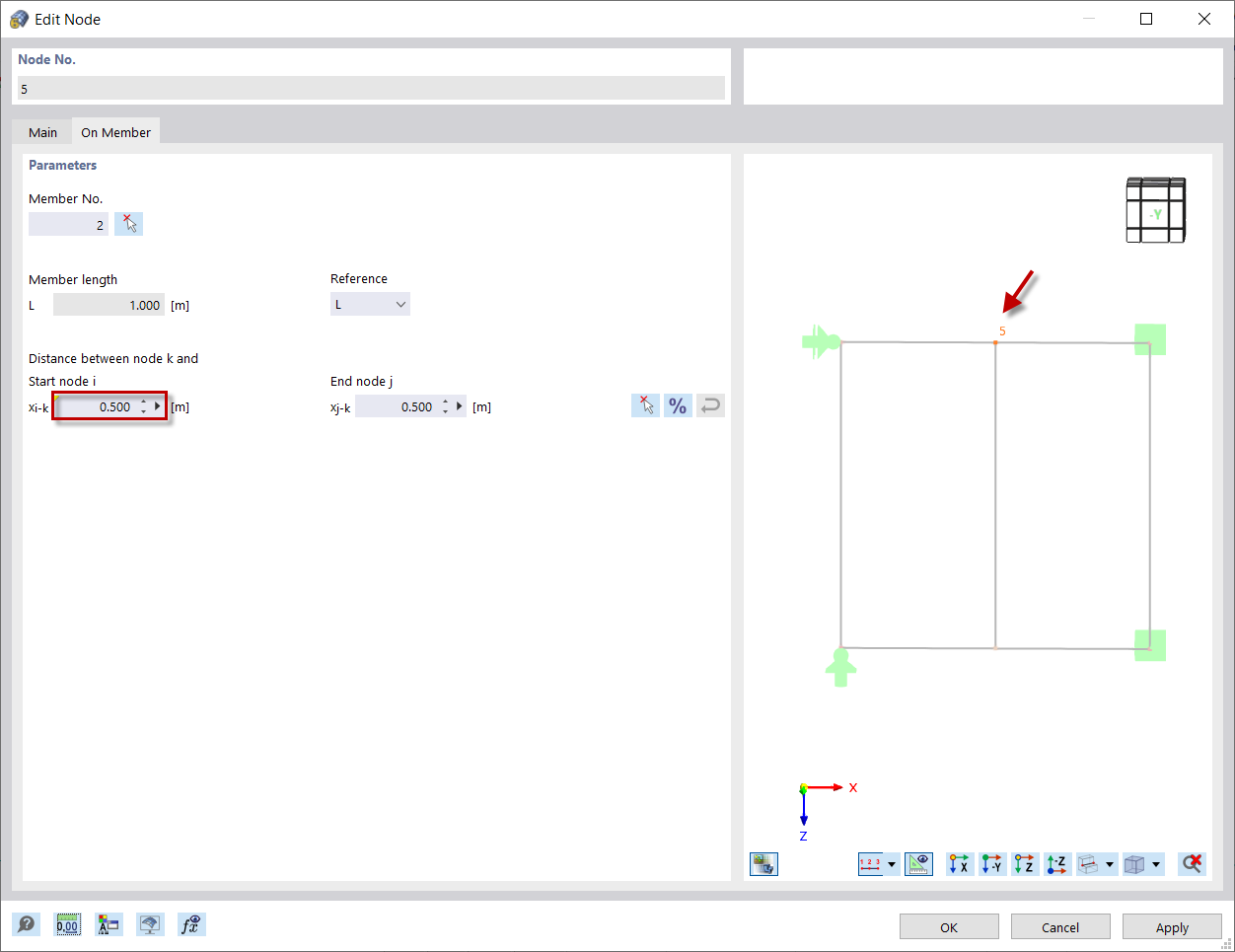
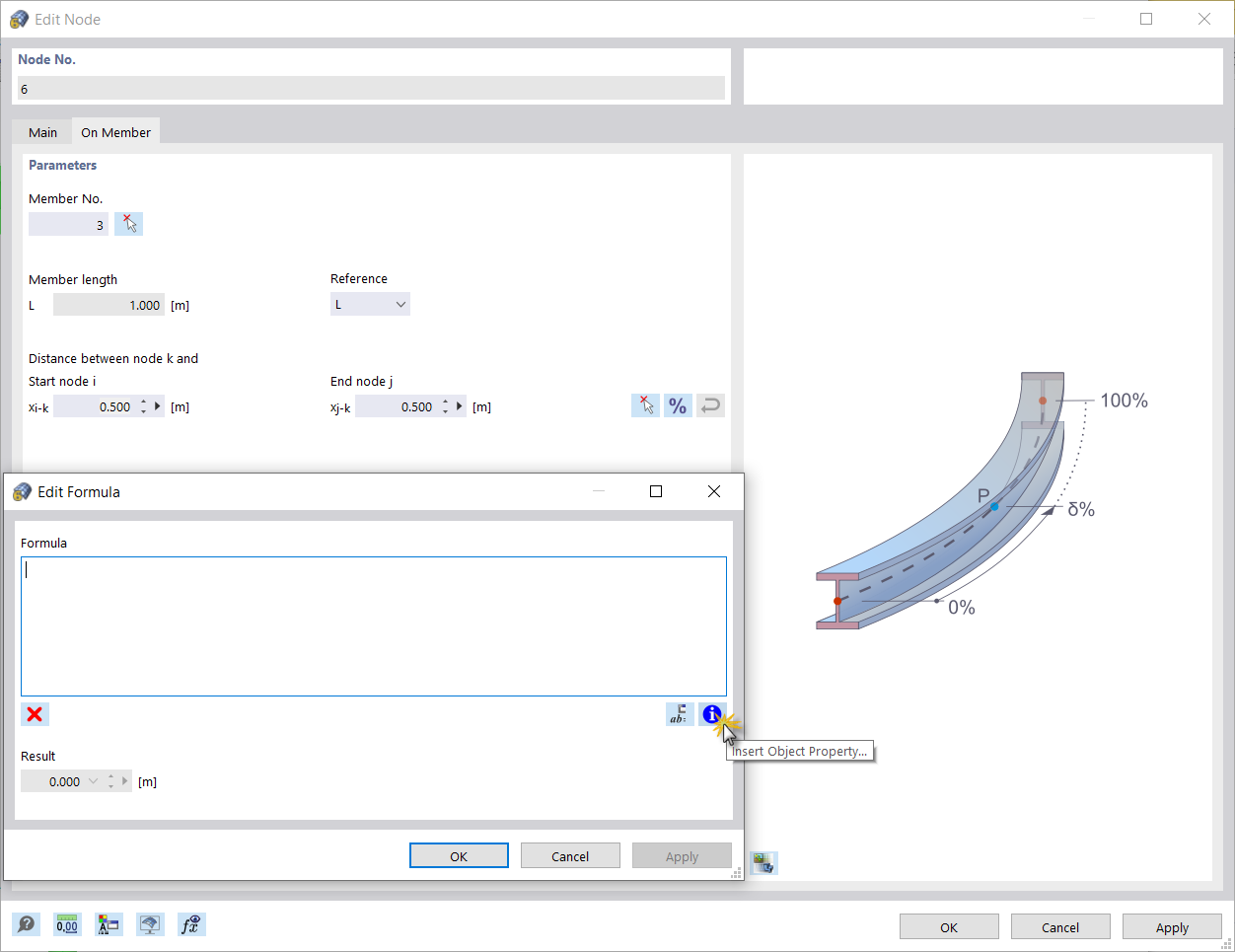
为此打开节点 5 的' 编辑节点' 对话框。 由于单个杆件被一个中间节点划分,所以生成的节点与杆件的始端和末端节点之间的绝对距离为0.5 m。 由于所选节点与杆件始端节点之间的距离要用公式来定义,所以在列表中选择' 编辑公式' 选项。
提示
使用按钮
![]()
,您可以控制是以绝对值还是相对距离(%)输入。
在' 公式 ' 文本框中输入公式。 例如在图像 image033161 编辑公式 中的公式显示,该距离是通过将参数 'Xabove' 的值添加到 0.5 m 来计算的。 由于 'Xoben' 最初被设为 0,所以公式为 0.5 m。
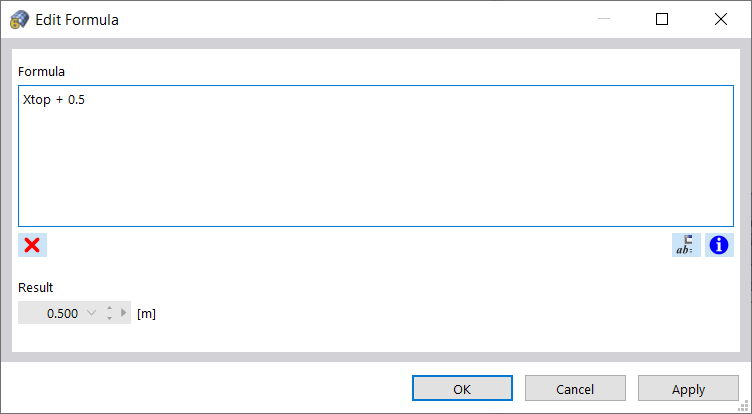
这意味着节点 5 和杆件 2 的起始节点之间的距离仍然为 0.5 m。
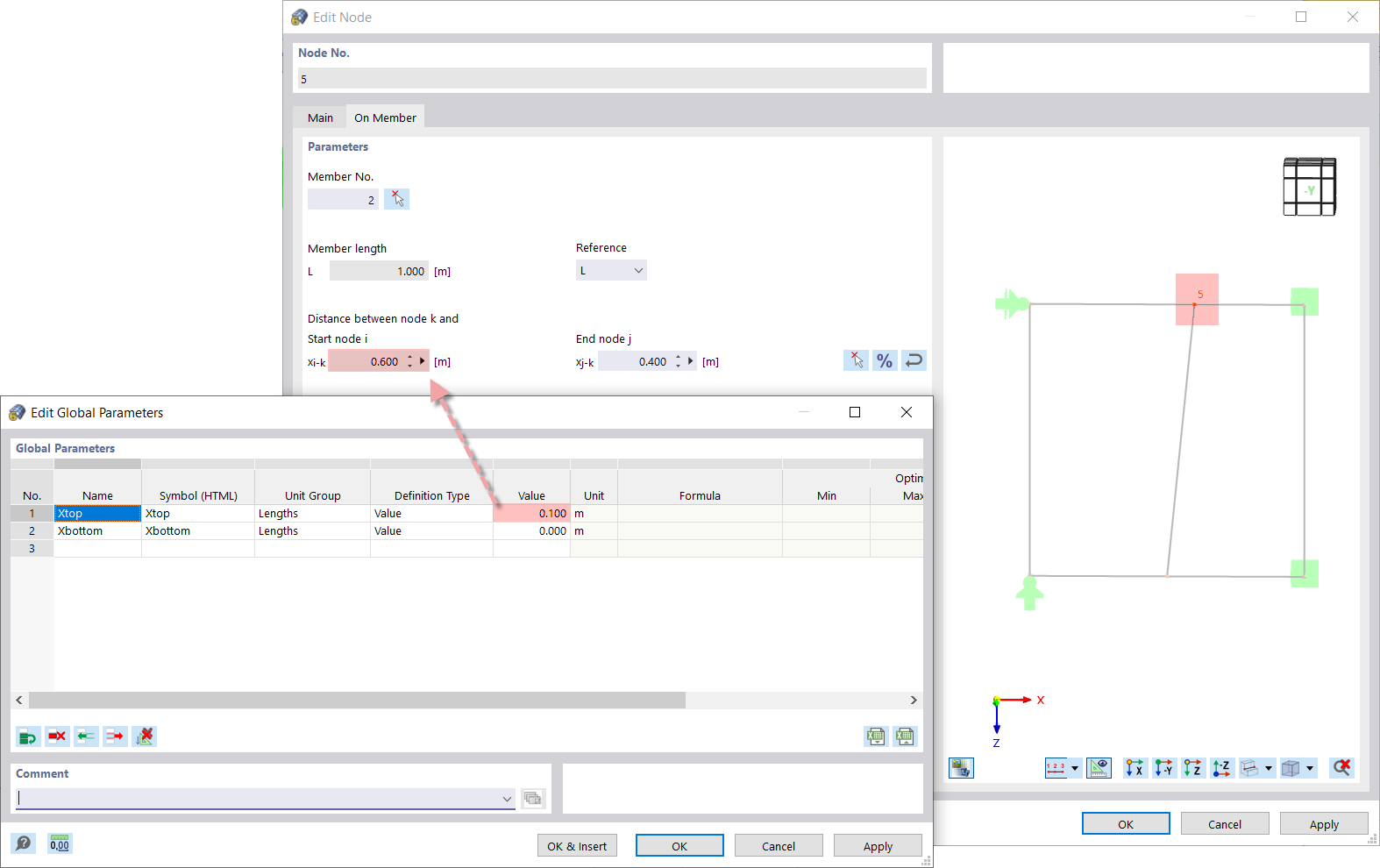
参数化输入的优点是,如果更改了参数列表中的某个参数,那么使用该参数的所有公式的结果都会相应地调整。 如果重新打开'全局参数'列表并将 'Xup' 的值设为 0.1 m,则节点到杆件始端节点的距离也会改变。 因此,节点 5 与节点 2 的距离自动更改为 0.6 m (Xabove + 0.5)。
将对象属性插入公式
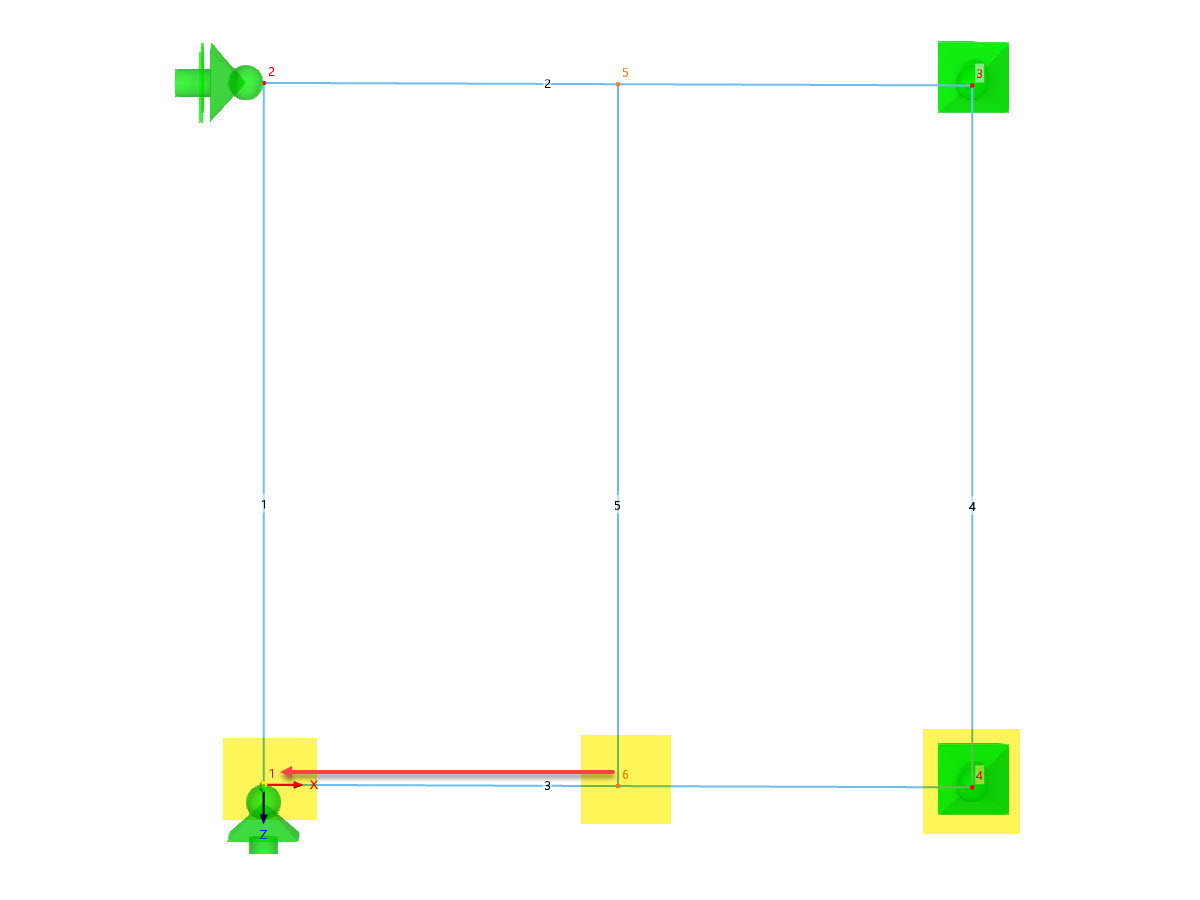
利用公式编辑器的另一种方法是将对象属性添加到公式中。 这通过计算节点 #6 到杆件 #3 的起始节点的距离来显示。 其目的是定义节点 #6 相对于杆件始端的位置,使其始终相对于节点 #4。 即如果移动节点 4,那么节点 6 的位置也会自动调整。
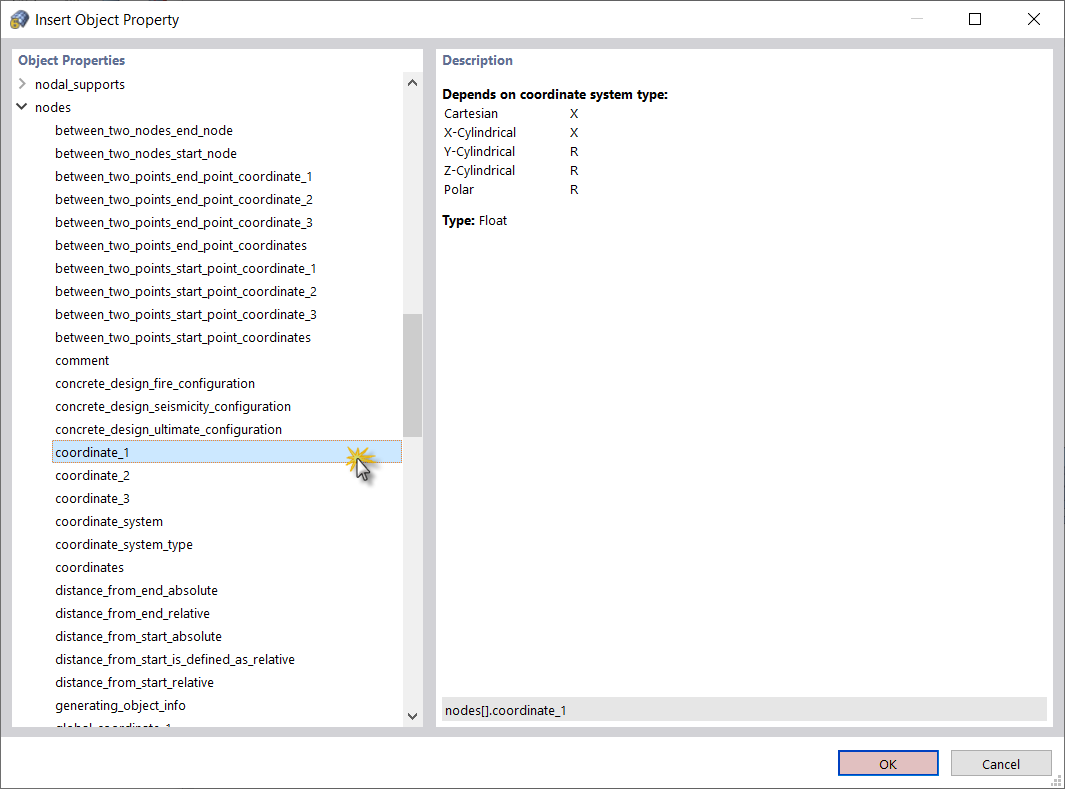
在' 编辑节点' 对话框中打开节点编号的公式编辑器。 6(见图 编辑节点编号 5)。 然后点击
![]()
按钮。
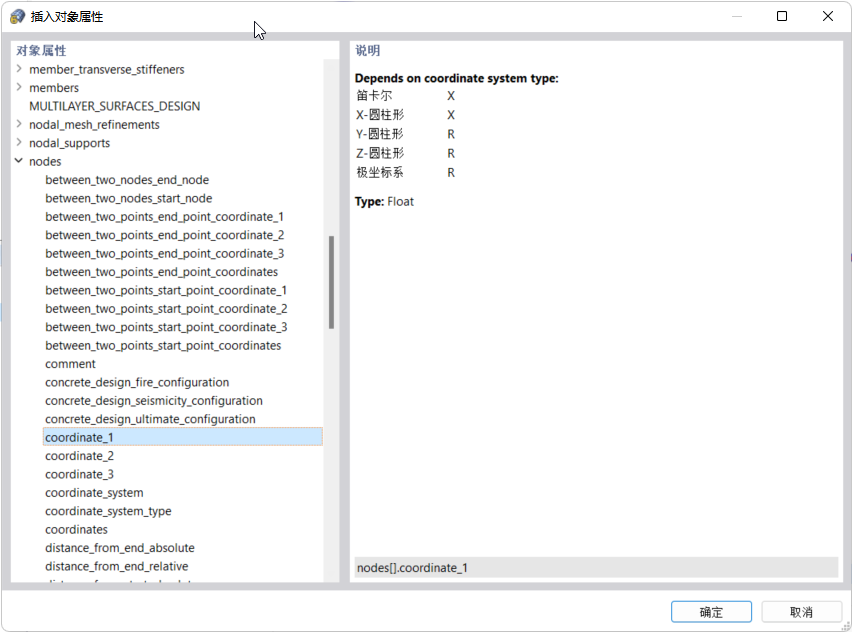
在这里您可以选择包含子类别的对象属性列表。 选择需要的属性,在本例中为坐标_1(即节点的笛卡尔 X 坐标)。 这样您可以将节点 # 6 的位置与另一个节点(在本例中为节点 # 4)的 X 坐标相关联。
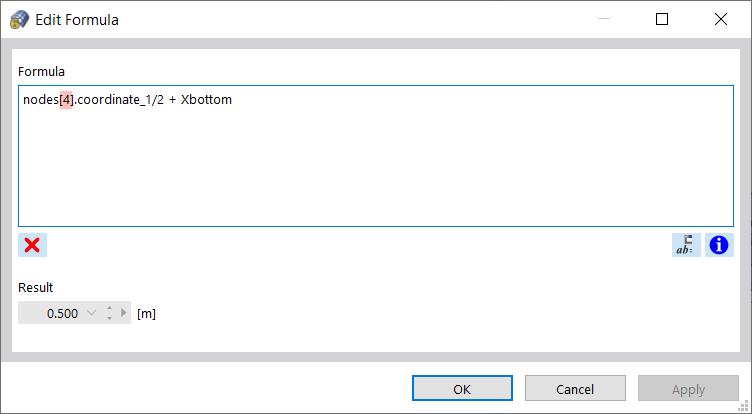
在公式的方括号中输入节点 4 的数目。 在本例中,节点 4 的 'coordinate_1' 包含在公式中: 如果移动节点 4 并改变其 X 坐标,那么节点 6 的位置也会自动调整。
参数优化
在 RFEM 和 RSTAB 软件中的优化是与实际模型计算同时进行的一个过程。 这可以看作是一个后参数化步骤,因为它假设模型是使用参数输入创建的。
上一章介绍了如何使用参数输入。 本章介绍了如何优化定义的参数。
定义全局参数的类型
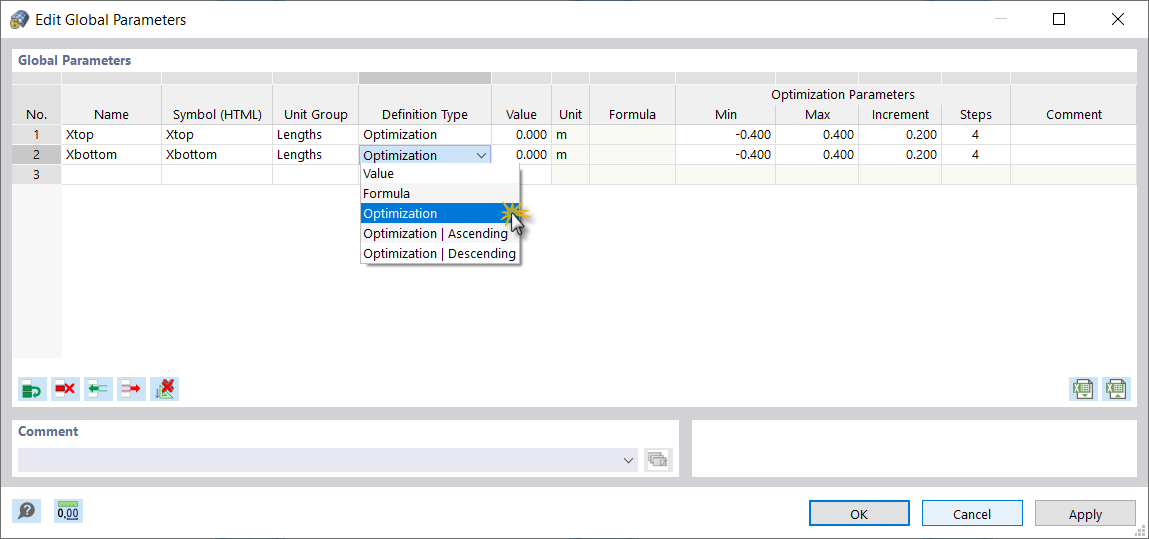
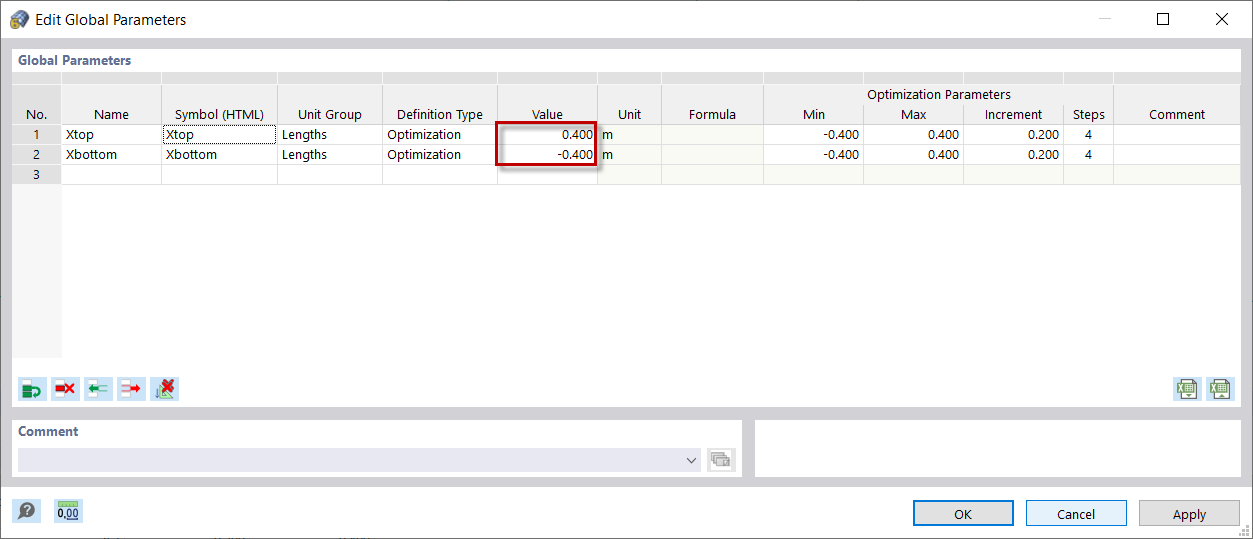
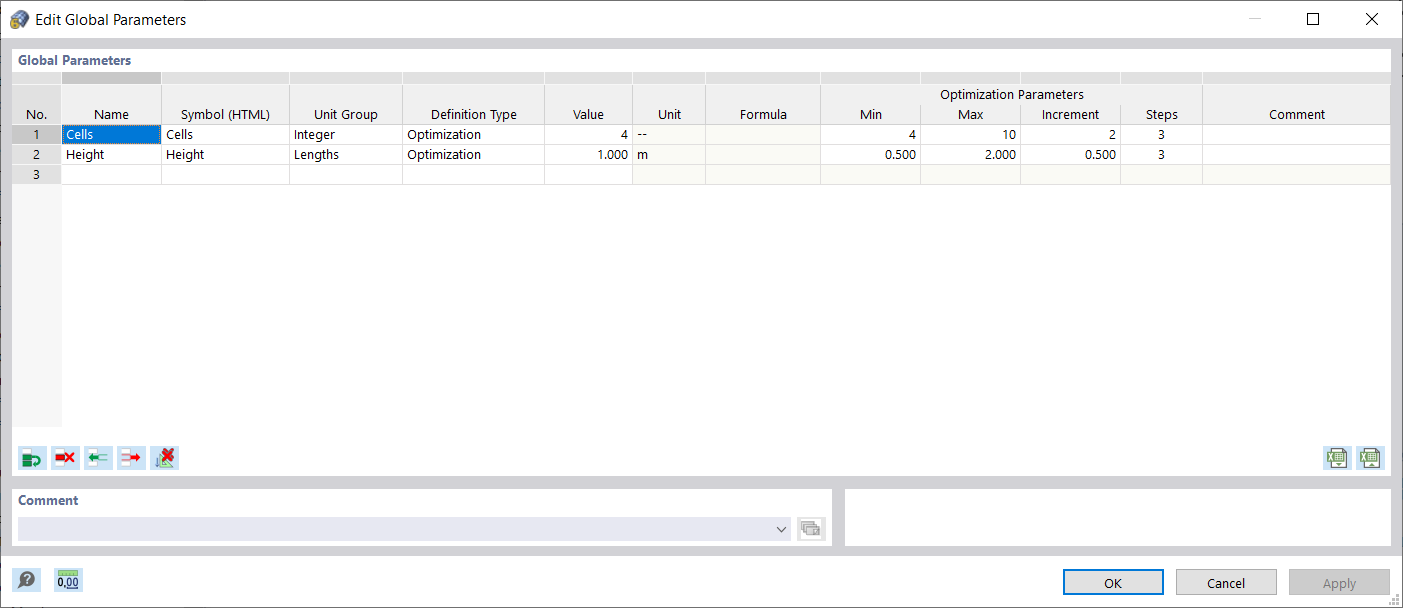
要优化全局参数,请为其分配定义类型' 优化'。 然后定义优化参数,例如最小值 - 和 最大值, 增量 和 步长。 在示例中,范围设置为 -0.400 到 0.400,增量为 0.200。
全局参数列表在编辑 → 全局参数菜单中打开。
定义优化设置
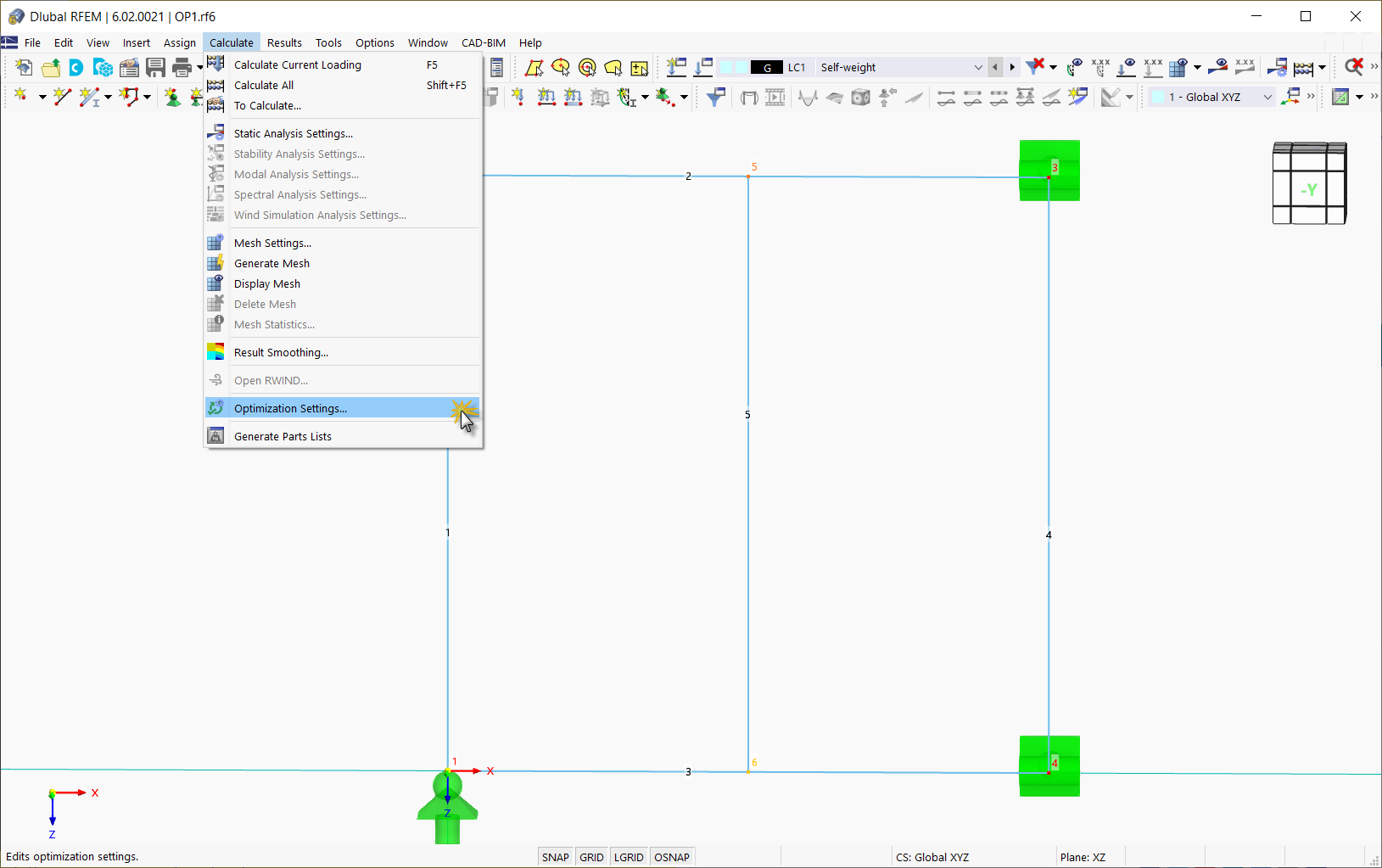
到目前为止,已经定义了 'Optimization' 类型的全局参数。 现在通过'计算'菜单打开优化设置。
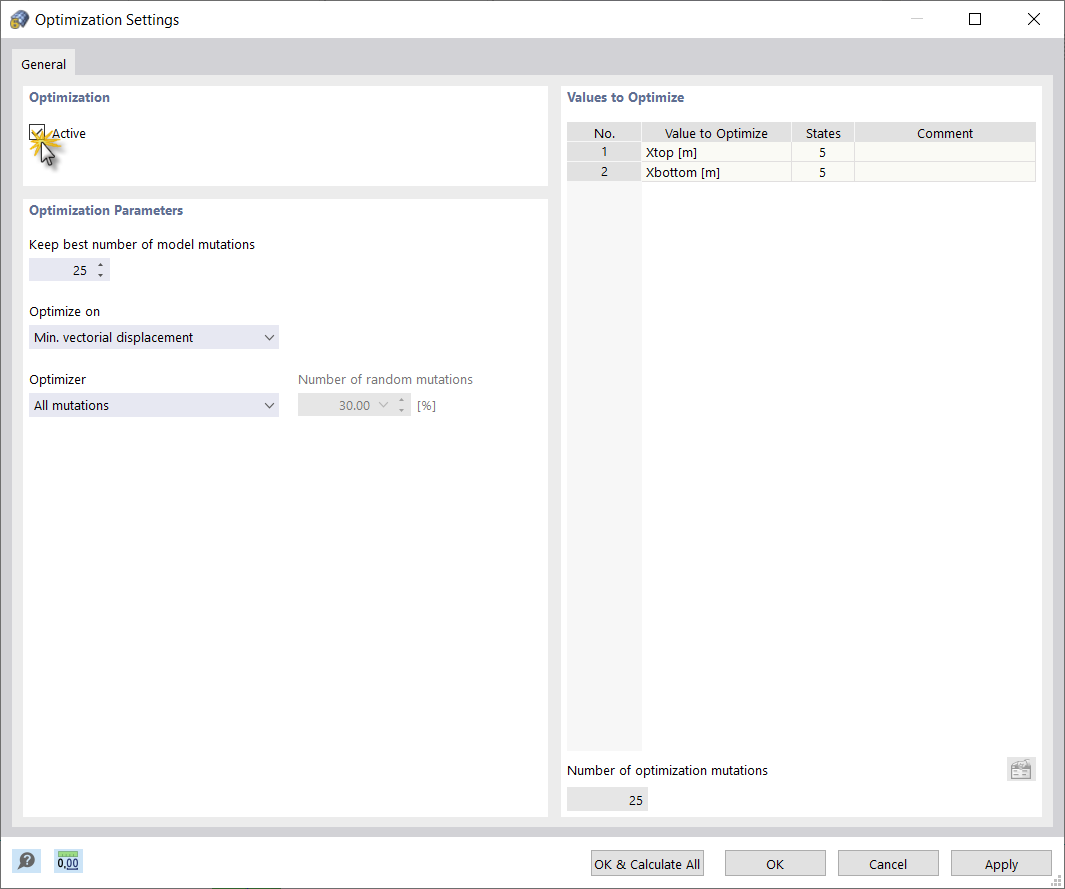
通过相应的复选框激活优化。 如图 image033236 优化设置 所示,要优化的值实际上是全局参数。 状态数目取决于在优化参数中分配的步数。 例如,四个步骤意味着优化过程在五个状态后结束。 给定这两个变量,就有 25 种优化变化,即所谓的突变。 换句话说: 程序会在定义的范围内更改这两个变量的值。 通过这些组合,可以计算出 25 个模型,每个模型都具有不同的几何形状。
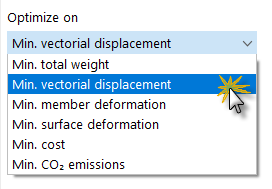
可以有很多优化突变。 然后,您可以通过定义优化的优先级来自己决定想要“最佳”生成多少个模型变量。 例如,您可以将优化设置为最小总重量、矢量位移、杆件或面变形、成本或 CO2排放量。
重要
在本例中选择了关于最小矢量位移的优化。
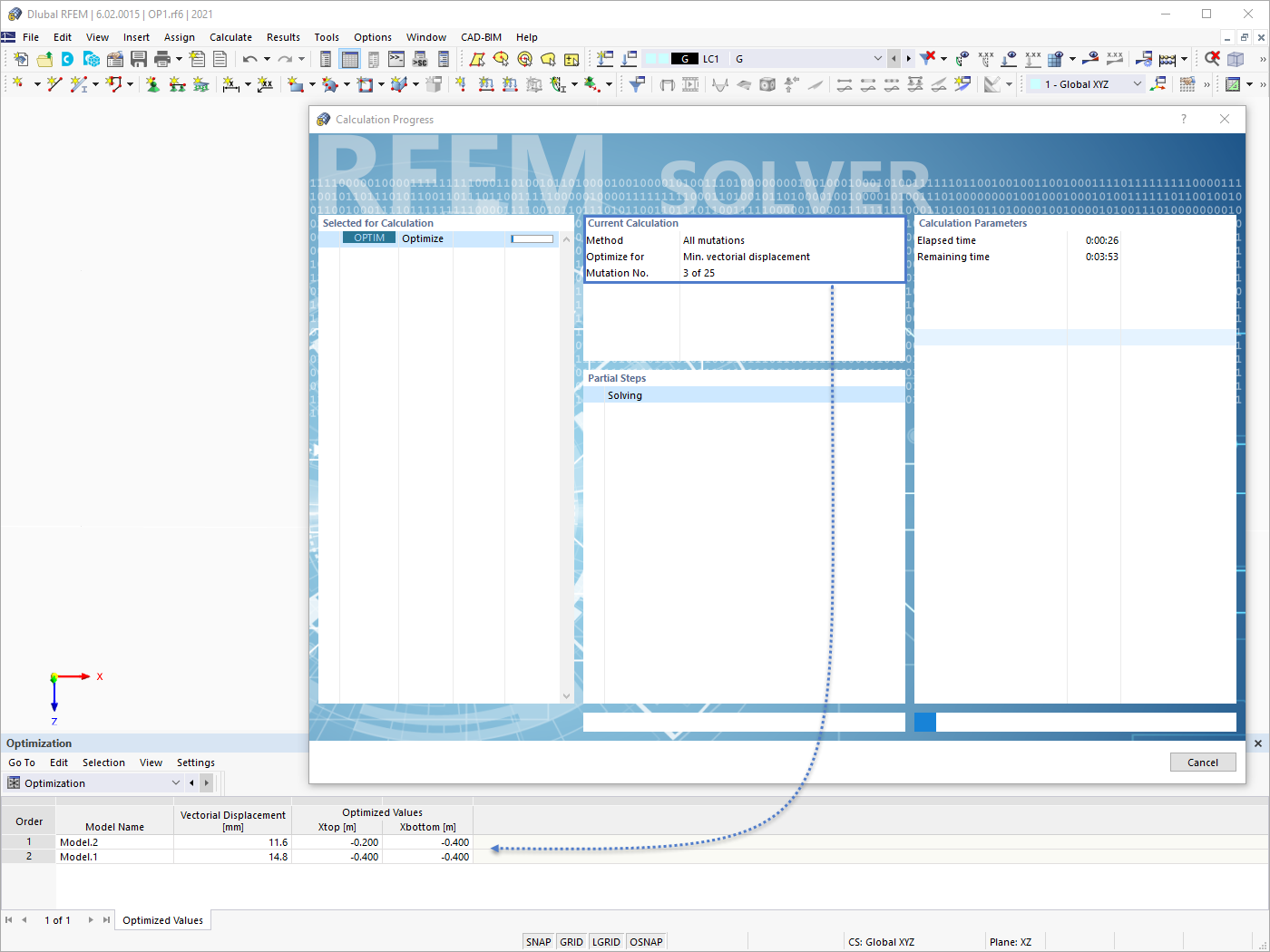
现在可以计算所有优化突变。 计算开始后,依次显示单个变量的结果。
优化方法
但是,该程序提供了更有效的优化方法。
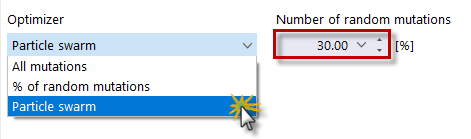
本例中使用的方法是粒子群优化 (PSO) 。 它基于自然界,是一种非常有效的方法,可以在很少的计算时间内找到好的参数值。 这种人工智能 (AI) 技术与成群的动物寻找休息地的行为非常相似。 在这样的群体中,有很多个人(参见优化解决方案,例如重量),他们喜欢留在一个群体中并跟随群体运动。 假设群体中的每个成员都需要在一个最佳静止位置休息(参见最佳解决方案,例如最小重量),并且这个需要随着接近静止位置而增加,所以群体的行为也由以下属性决定的面积(见结果图)的影响。
RFEM 或 RSTAB 中的 PSO 过程以类似的方式进行。 计算从随机分配要优化的参数的优化结果开始,并根据之前所做的模型突变的经验,用不同的参数值重复确定新的优化结果。 当达到指定的可能的模型突变数量时,该过程结束。 在本例中,随机突变的数目设为30% 。 这意味着所有可能的突变 (25) 中的 30% 都会被考虑。
或者,在程序中也提供批处理方法。 该方法通过随机指定优化参数的值来尝试检查所有可能的模型突变,直到达到指定的模型突变数。
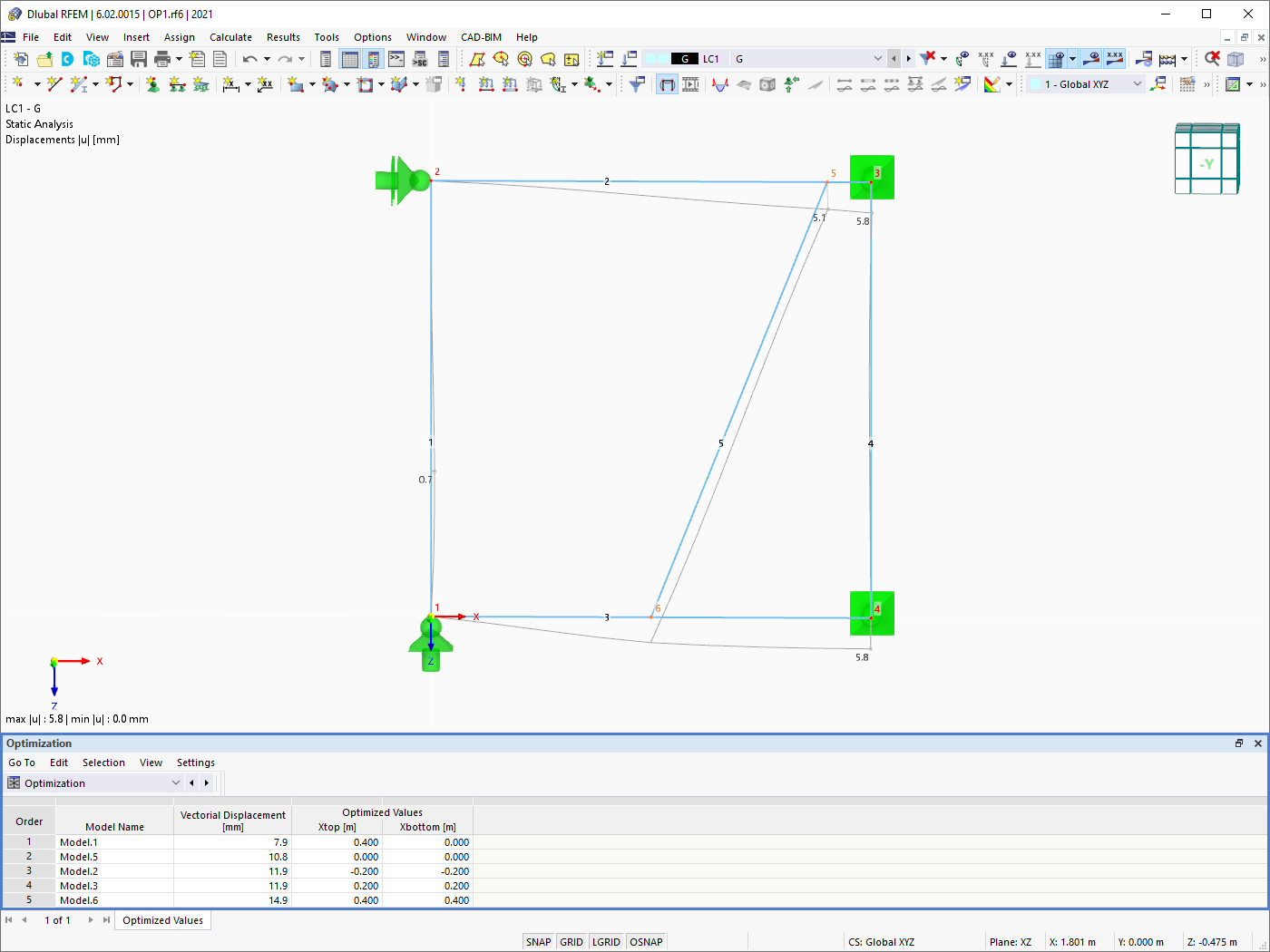
优化结果
所有的优化方法都会在过程结束时输出一个包含模型突变(变体)的列表。 在这里您还可以找到重要的优化结果以及相关的优化参数的取值。 该列表是按降序排列的: 在顶部显示了假设的最佳解决方案,其优化结果与确定的值分配最接近优化准则。
在示例中使用粒子群作为优化器,随机突变的数量设置为 30%。 这意味着已经考虑了 25 种可能的突变中的 30%,从而产生了 7 种具有优化值的模型。 如前所述,第一行显示了假设的最佳解决方案。
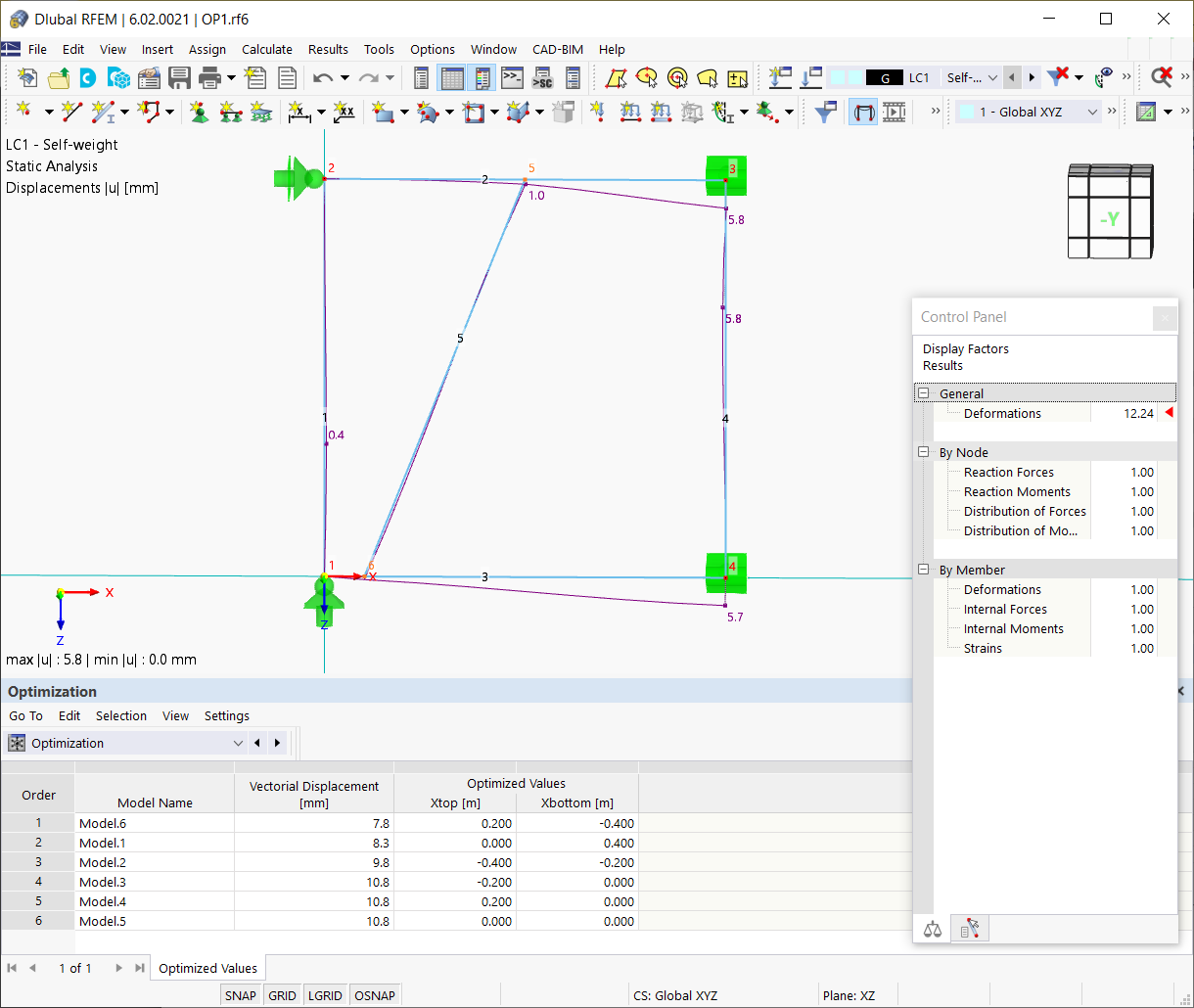
此外,在分析完成后,程序会自动为全局参数列表中的优化参数设定最优解的赋值。
RFEM 6 中的脚本
RFEM 6 的一大优势是使用了内置脚本。 本手册的这一章介绍了如何在 RFEM 6 中通过控制台和脚本管理器编写脚本,并将其保存为"块",以供进一步使用。
脚本
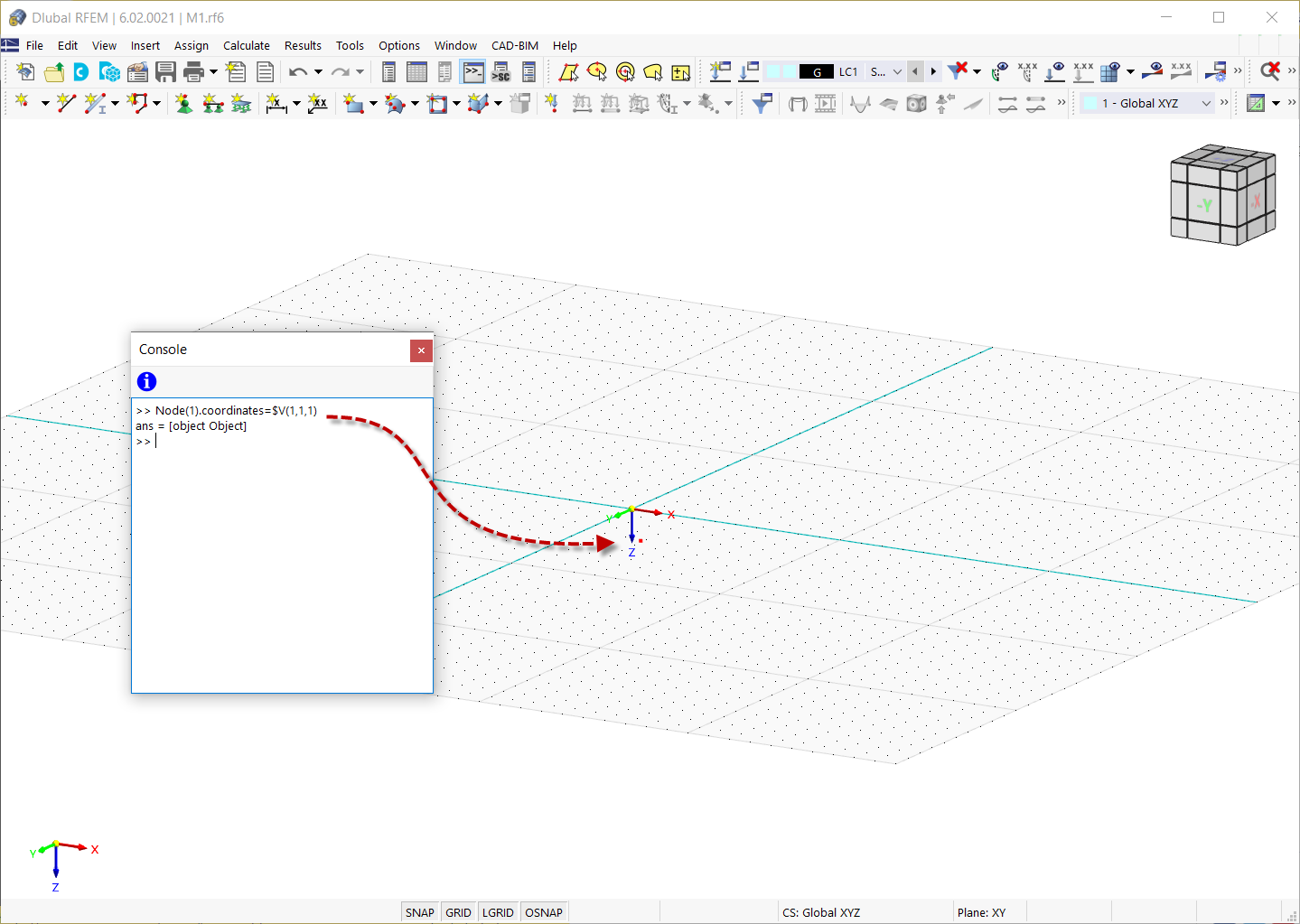
控制台
控制台对于输入和执行命令或检查结果非常有用。 在控制台的“视图”菜单中单击相应的条目,或使用工具栏中的
![]()
按钮打开控制台。
您可以在控制台中直接输入和执行命令。 自动完成功能可以帮助您快速插入函数和对象属性。 它还有助于避免输入和语法错误。 例如图 在控制台中执行命令所示,如何定义一个节点,其坐标为 X = 1, Y = 1, Z = 1。 最后,使用 Enter 键执行控制台中定义的命令。
您也可以在控制台中插入任何对象属性作为命令引用。 通过
![]()
按钮,您可以在对话框中查看所需的对象属性。 然后,通过双击或单击确定将对象属性传送到控制台。
脚本管理器
脚本管理器允许您组织脚本文件夹和脚本文件。 在“视图”菜单中单击相应的条目或在工具栏中单击
![]()
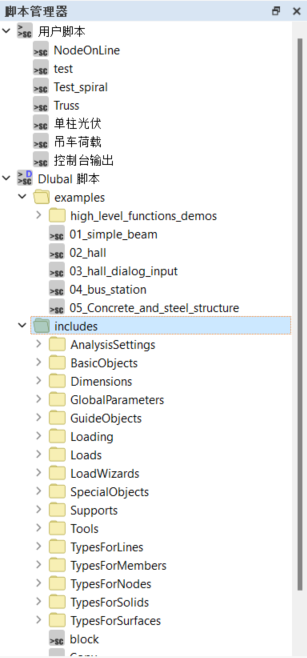
按钮,可以打开脚本管理器。 在Dlubal 脚本目录下,您可以找到一些安装过程中创建的脚本文件示例。 在“includes”文件夹中还有一个函数库,可以在脚本文件中使用“include()”命令对其进行访问。
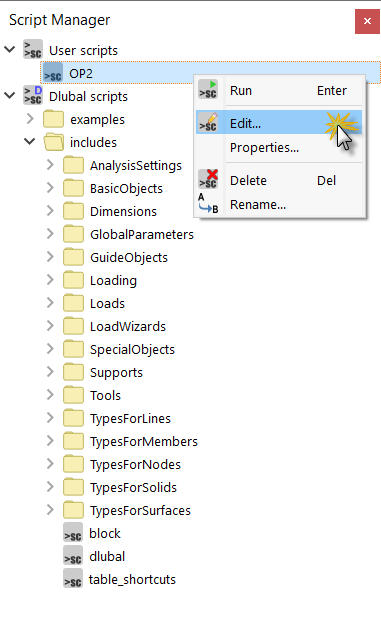
右键单击要保存脚本的文件夹。 然后在右键菜单中选择新建脚本。
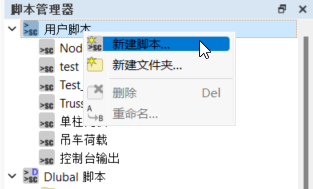
在我们的示例中,新建脚本名为 OP2,创建后可以在用户脚本中找到该脚本。 要编辑它,请右键单击它并选择编辑脚本。
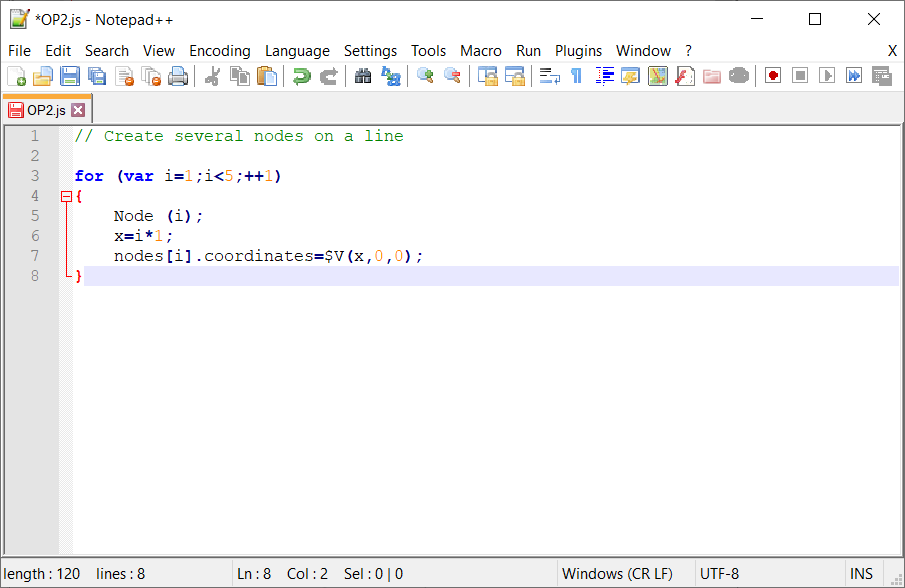
尽管我们在本次网络研讨会中使用了 Notepad++,但您可以使用任何其他编辑器在 RFEM 6 中编辑脚本。 例如,图 02 显示了如何通过编辑脚本在一条线上创建多个节点。 根据脚本中的命令,在 X 方向上每隔 1 m 创建一个节点,最多创建一个节点 i,本例中设置为 5。
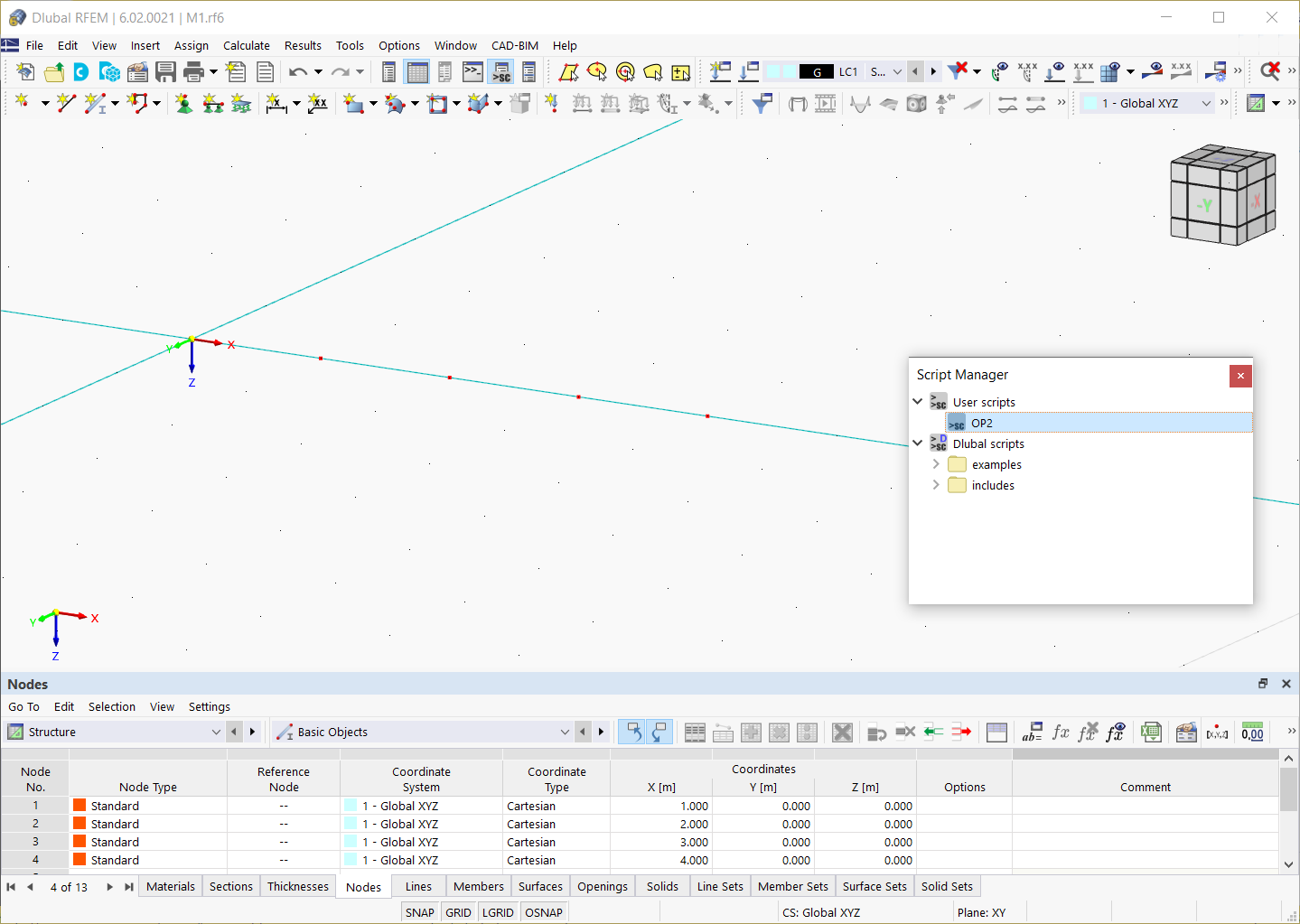
确保保存脚本。 在用户脚本列表中,双击脚本可以查看在 RFEM 工作窗口中创建的单元。
把脚本转换成块
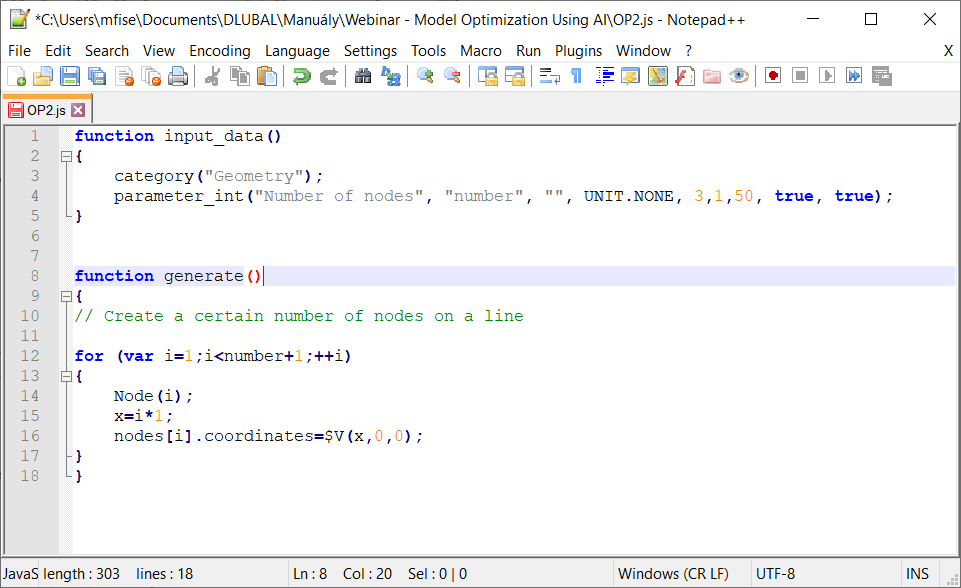
要从脚本生成块,首先要打开所需的脚本,然后在脚本中插入命令生成() ,如033723 '生成' - 脚本中的命令。 在编辑完脚本后,您需要保存它。
请注意,附加命令是用来创建结构的。
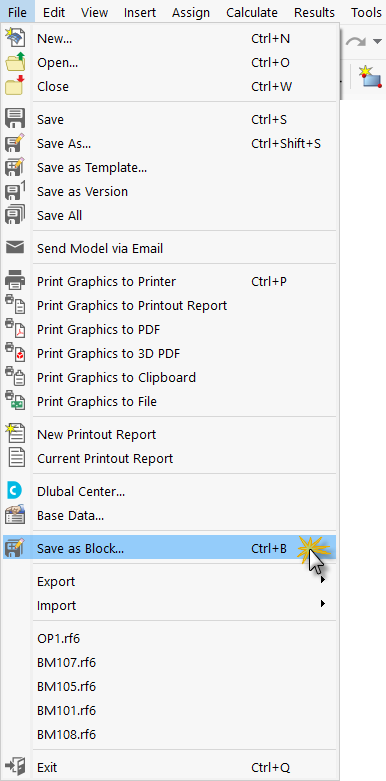
保存脚本后,使用 RFEM 菜单中的' 另存为块'功能' 文件'。
将之前保存的脚本添加为JavaScript 文件。
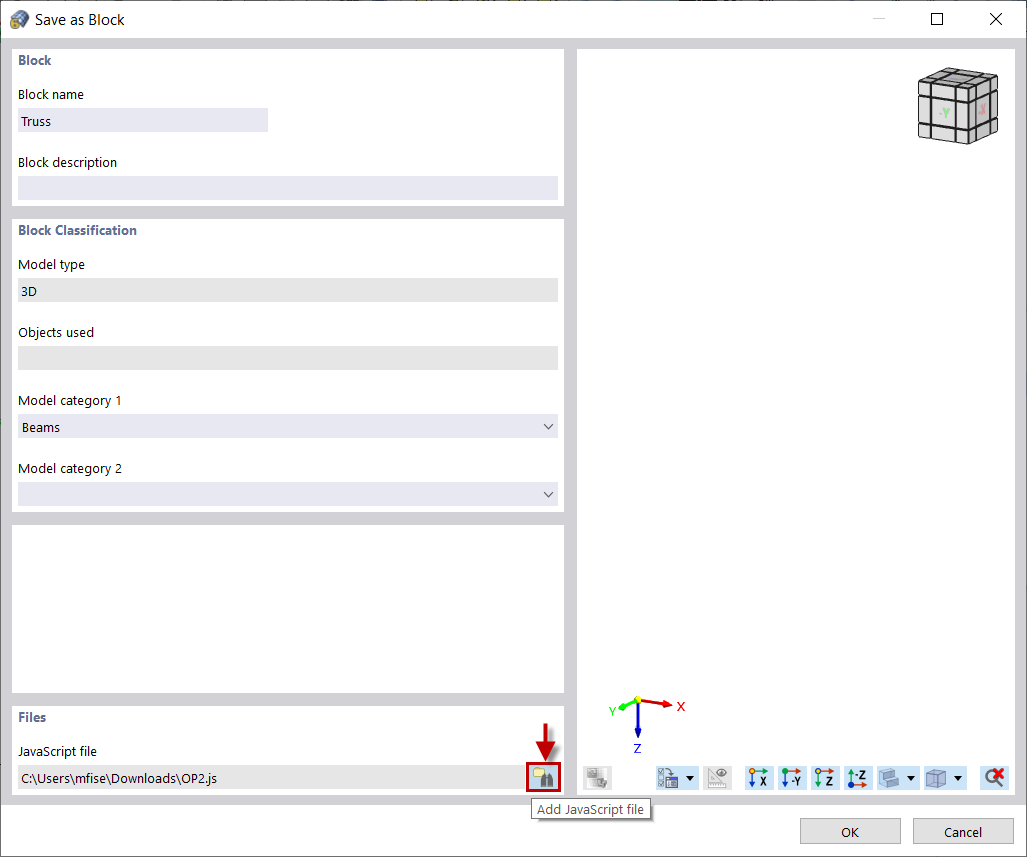
这样,程序将JavaScript 文件作为块保存在块目录中。 要插入块并继续使用它,请使用
![]()
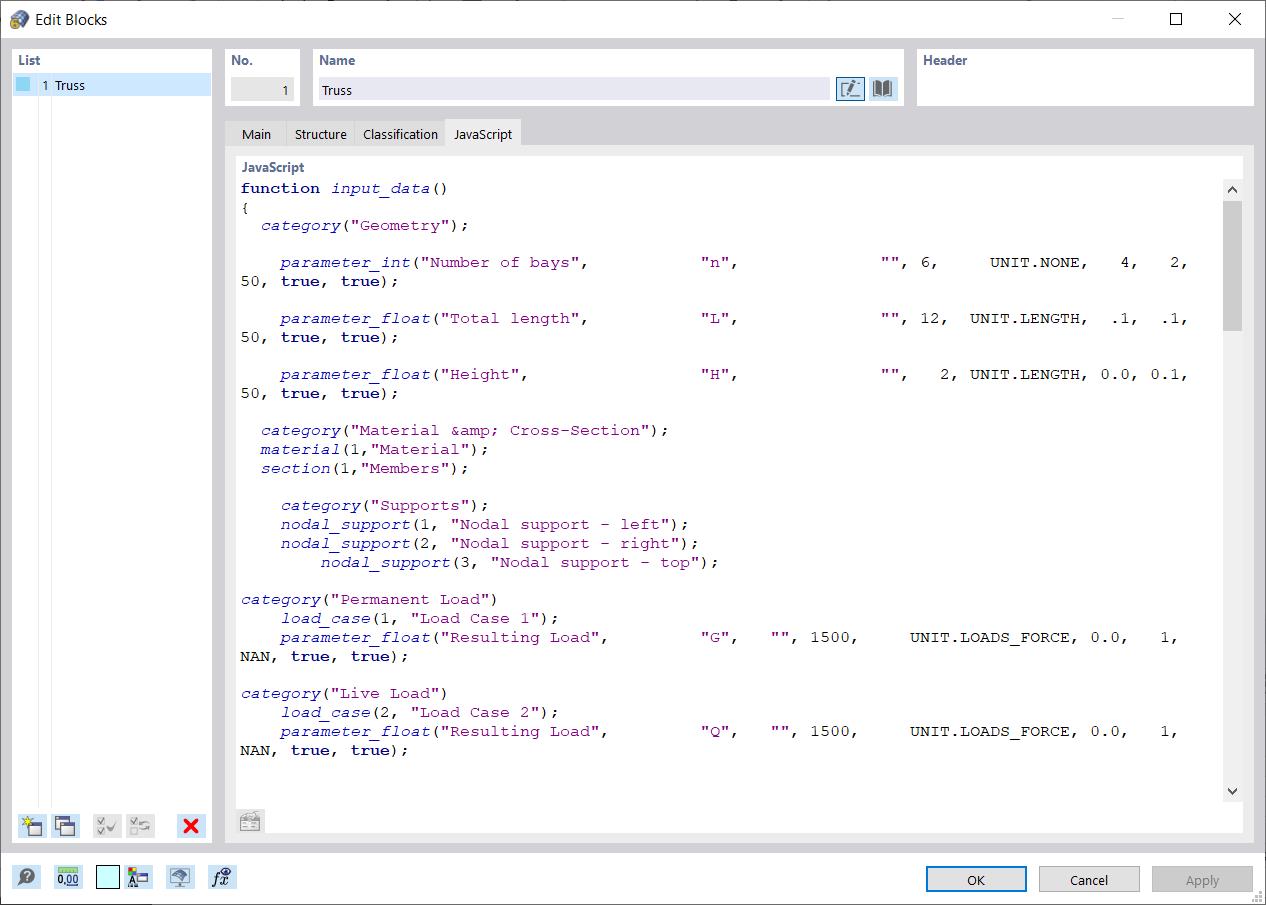
按钮打开目录,然后选择它。 插入时可以编辑块,并显示用于生成块的 JavaScript。 更多相关信息请参见 RFEM 手册 blocks。
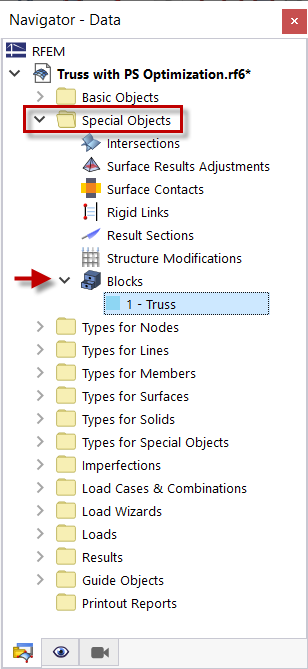
插入块之后,在导航器中会作为特殊对象使用。
重复使用通过脚本创建的块
插入块之后,在导航器中会作为特殊对象使用。 因此可以随时进行编辑。 在'结构'选项卡中,例如可以调整块体的几何参数、分配截面和材料。
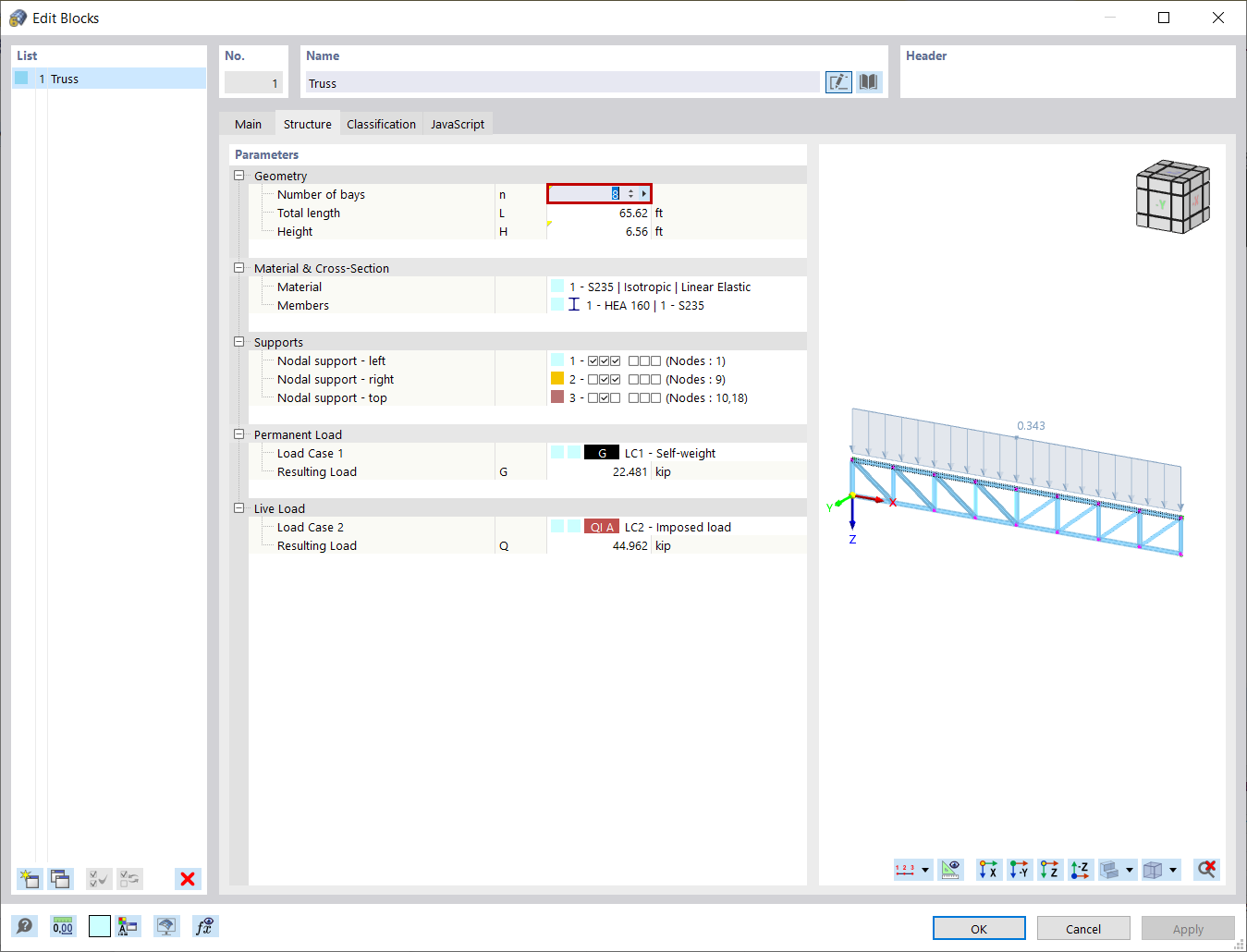
也可以将块的几何参数引用到参数列表中定义的任何全局参数。 为此请使用编辑公式功能并分配 ' 全局参数 '。 这样,在更改全局参数时,几何参数也会自动更改。
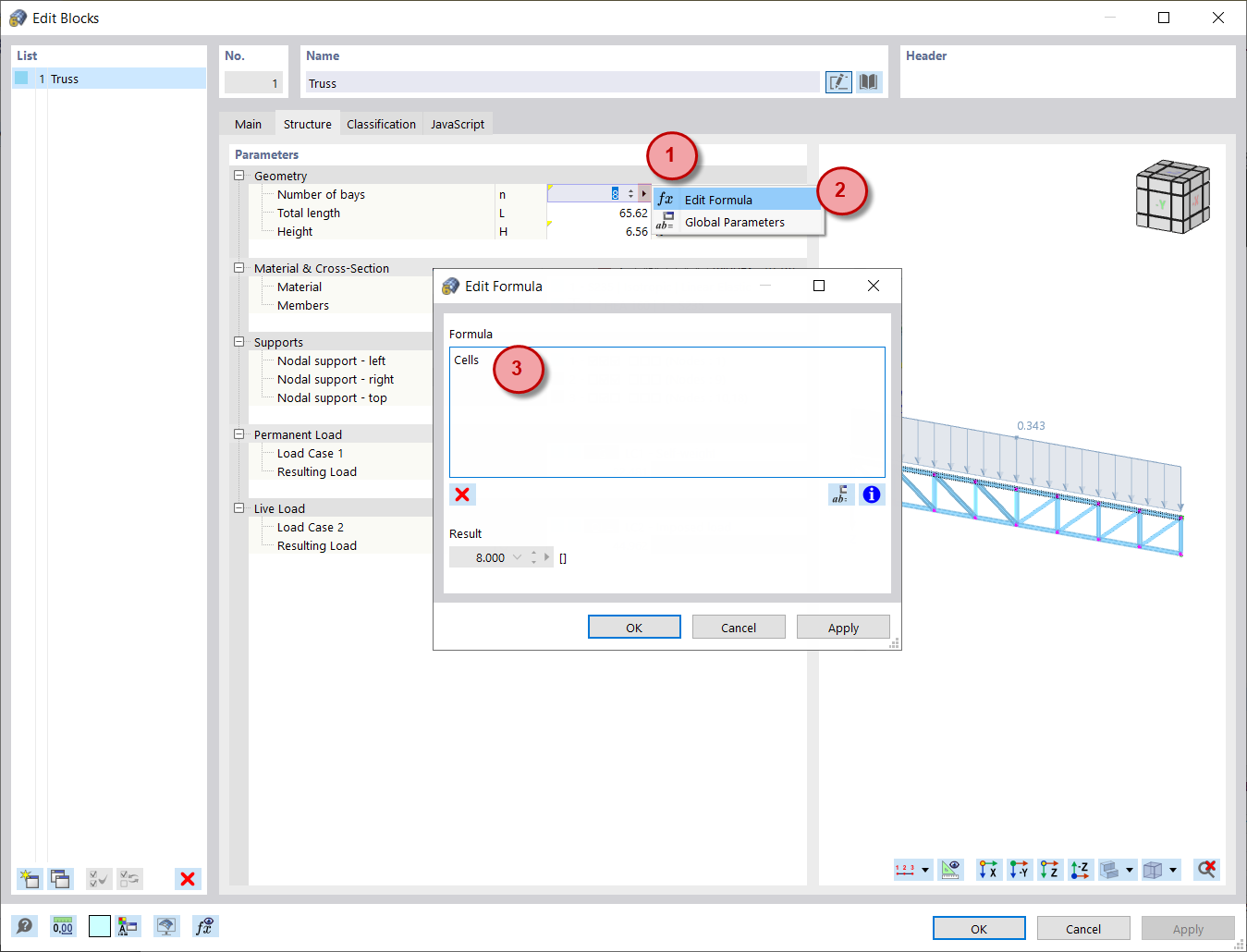
如果要编辑全局参数,请点击
![]()
按钮。
您也可以按照章节 中的描述对模块进行优化。
成本和 CO2 排放量估算
优化和成本/CO2 排放量估算的模块包含两部分,不仅可以为参数化模型和块找到合适的参数,还可以估算其成本和 CO2排放量。
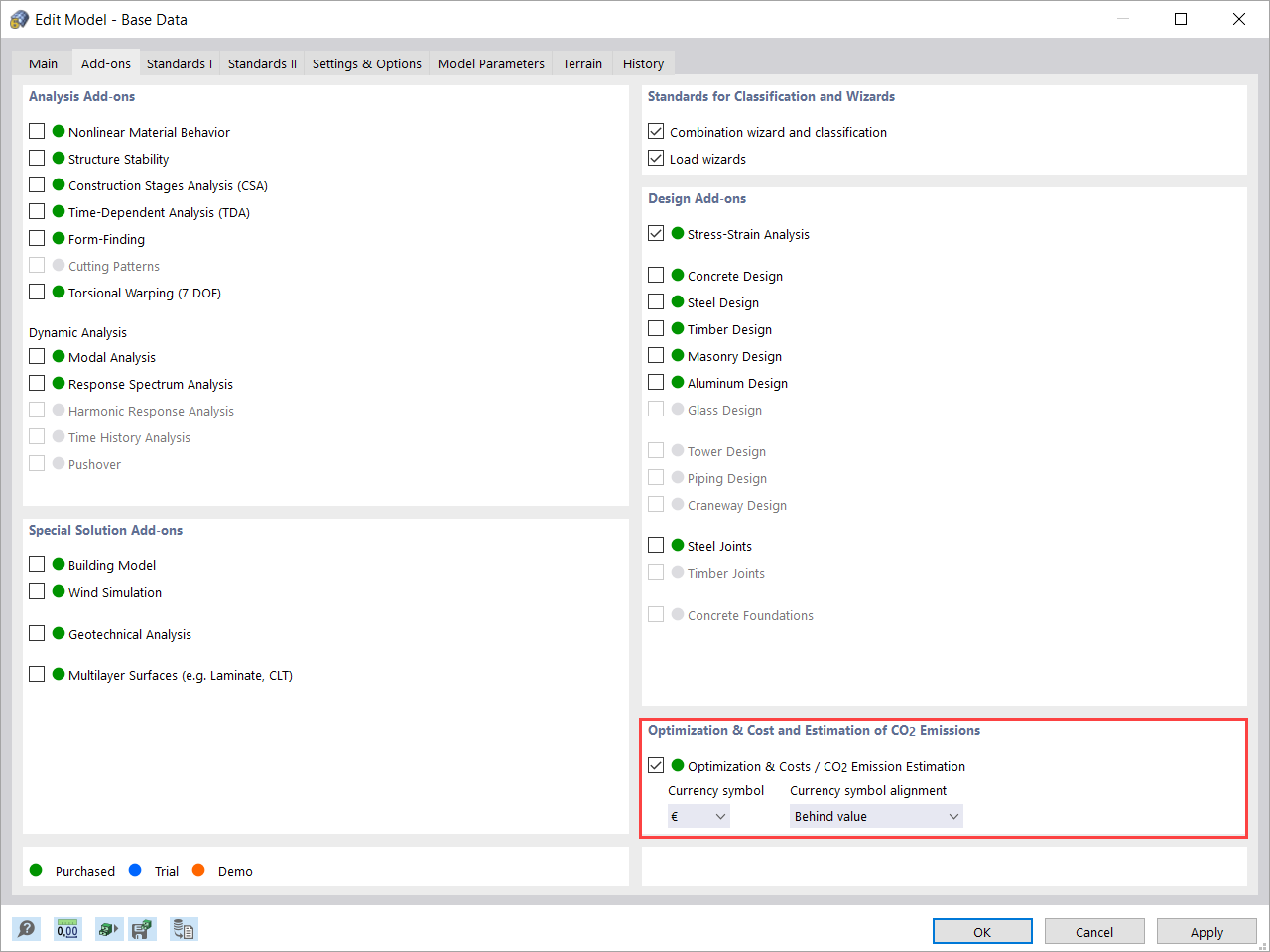
价格
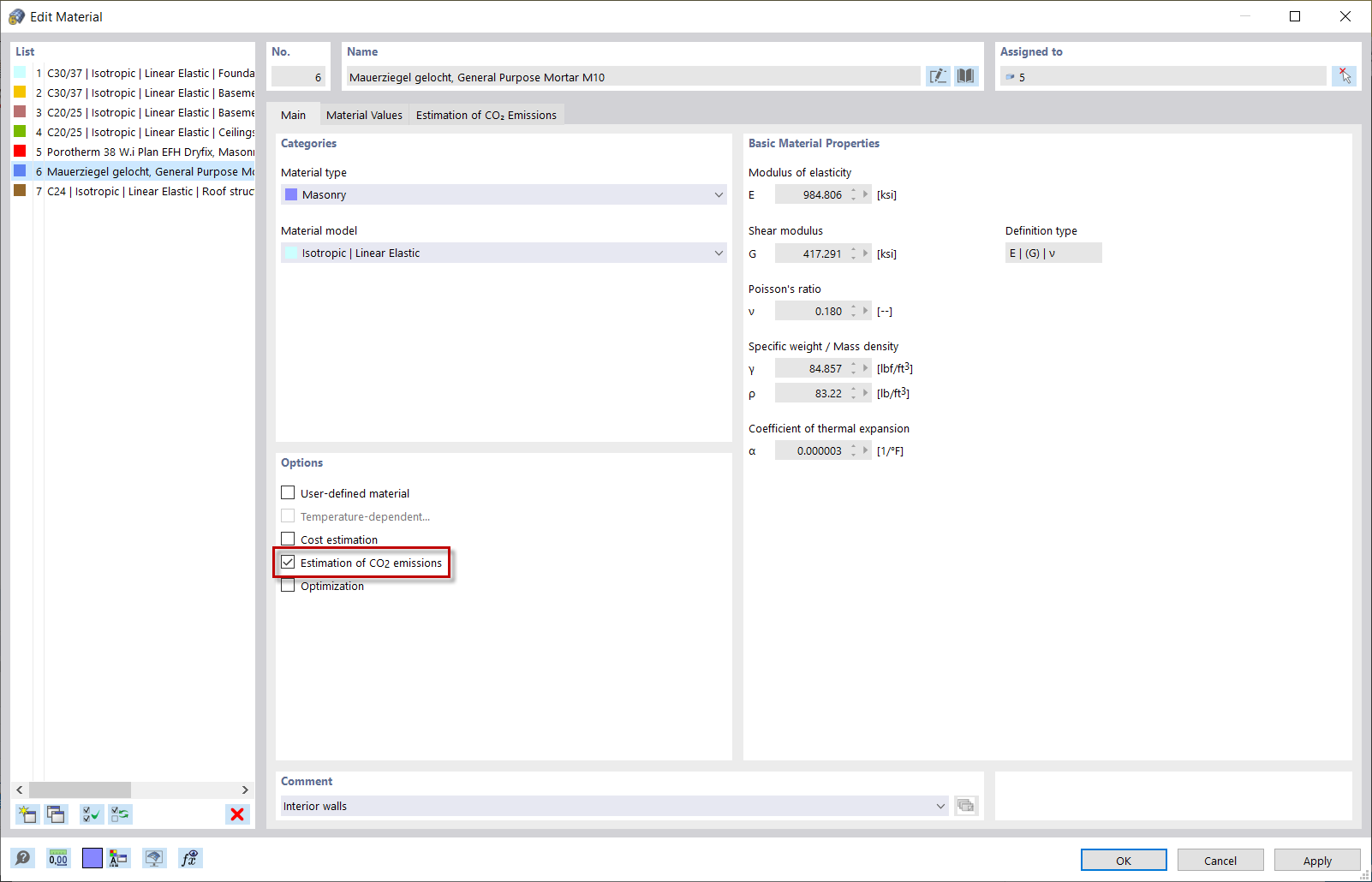
为了能够估算成本,在定义或编辑材料时必须激活成本估算选项。
信息
如果激活了优化和成本/CO2排放估算,则成本估算选项才可用。
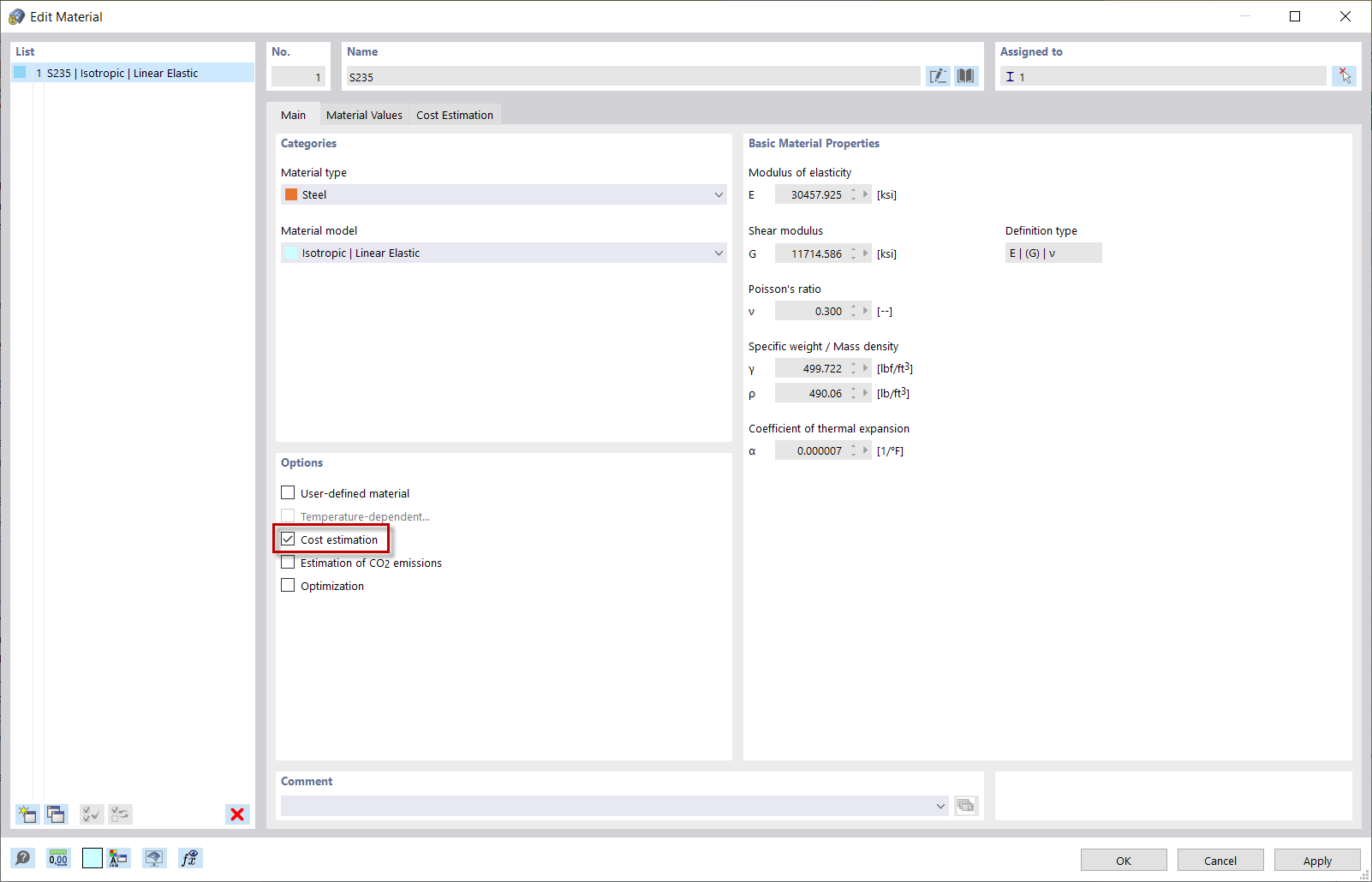
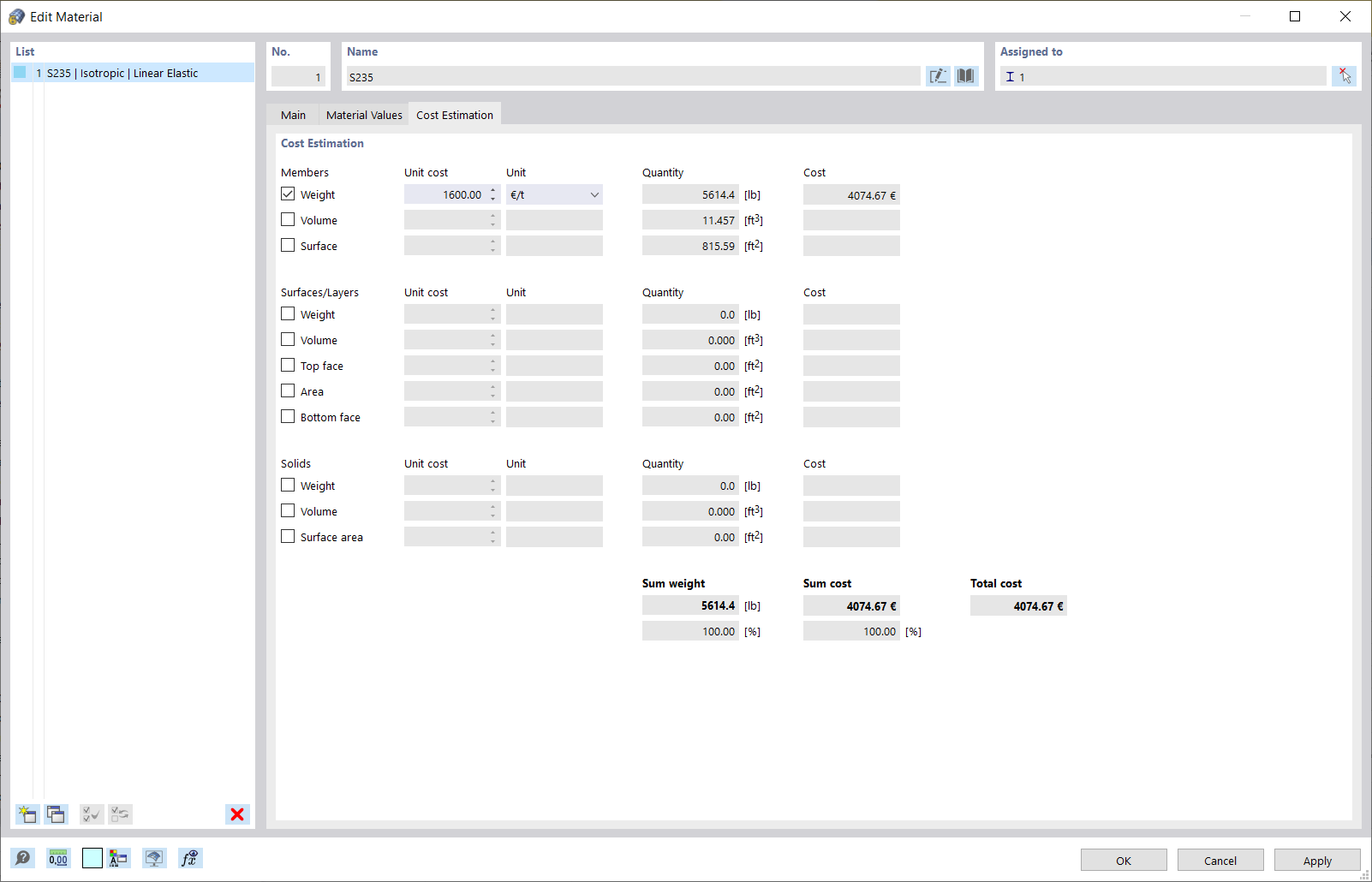
成本估算是基于杆件、面/层和实体的单位成本。 例如,如果要估算模型中杆件的成本,请指定单位成本和单位(片)。 由此,程序自动确定模型中杆件的成本。
成本优化
在使用参数化模型和块时,也可以基于最小成本进行优化。 在本章中,您将学习如何进行这种优化。
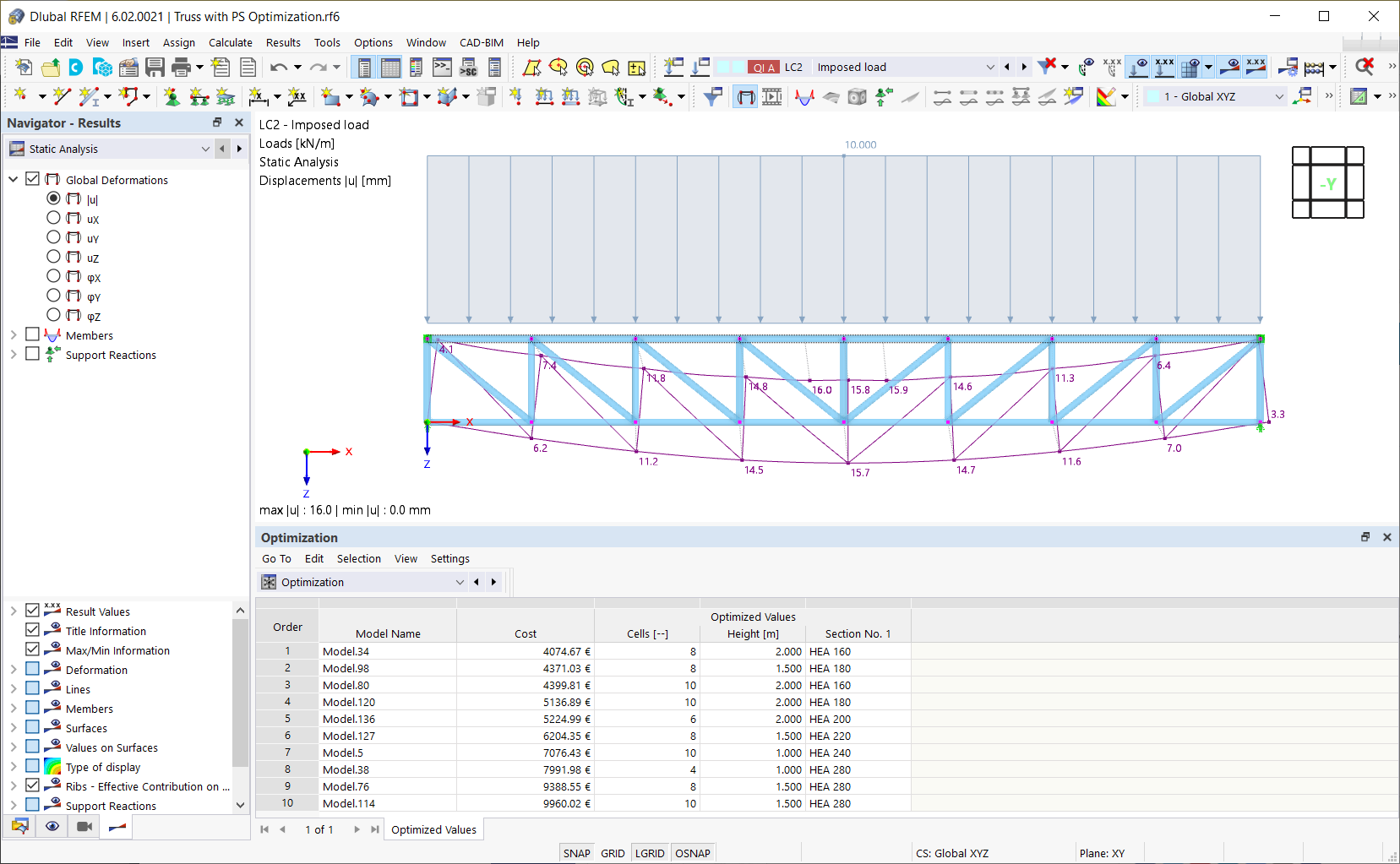
我们以桁架中显示的模型为例。 需要优化的值是:
- 像元数目
- 桁架高度
- 截面
在全局参数列表中,单元格数目和桁架高度作为全局参数进行设置。
信息
您可以通过菜单编辑 → 全局参数打开全局参数列表。
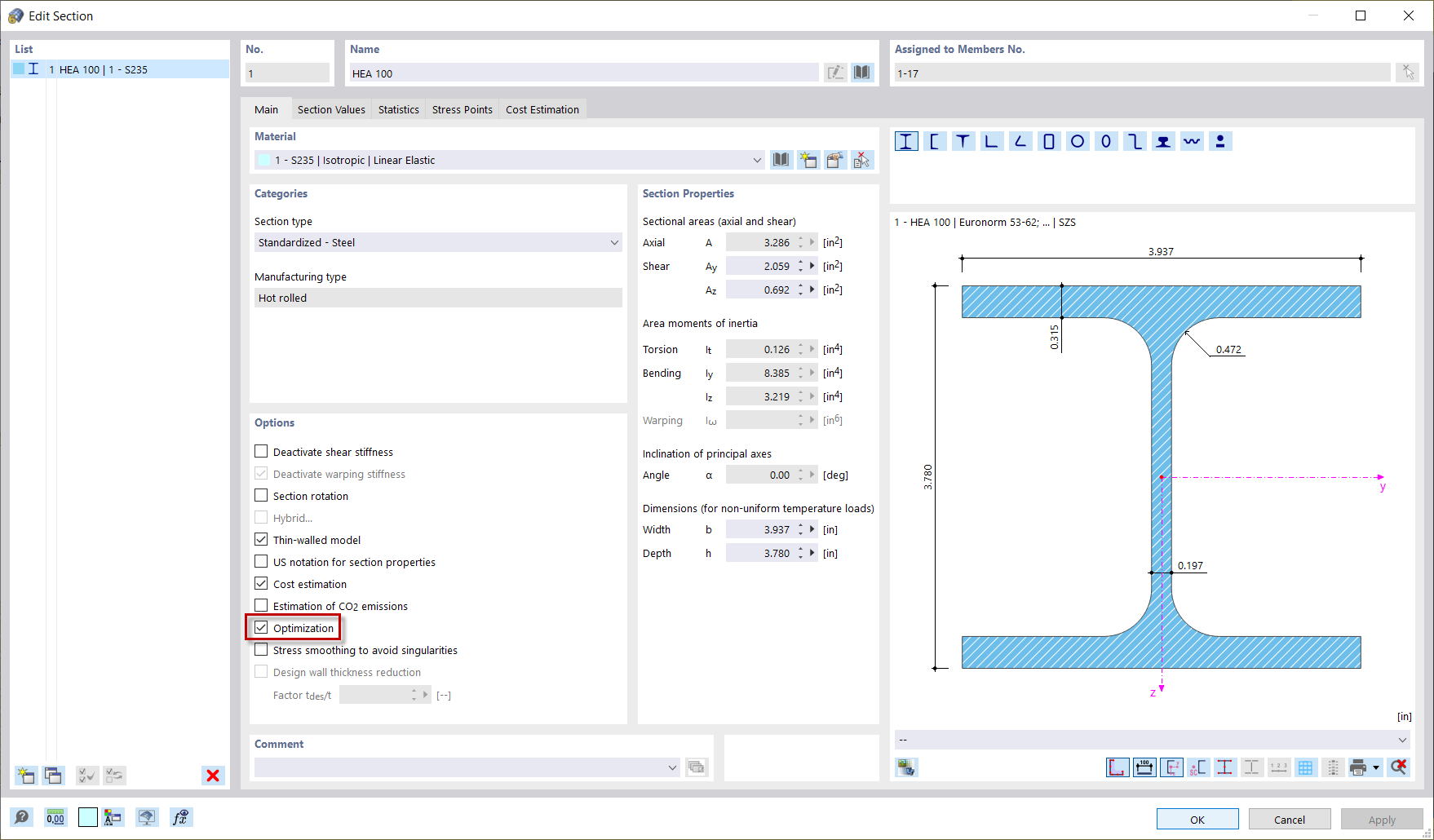
如果想要优化截面,则需要打开“编辑截面”对话框,然后在“选项”部分中勾选“优化”复选框。
由于优化是基于成本的,所以在进行优化之前必须要对成本进行估算。 具体操作按照章节成本估算中介绍的方法进行。
您可以通过“计算”菜单在软件中进行优化设置。 如图 优化设置所示,需要优化单元格数目、桁架高度和截面。 由于优化时应该确定最具成本效益的方案,所以 " 该示例使用粒子群优化 (PSO) 方法,并将随机突变的数量设置为总数的 40%。
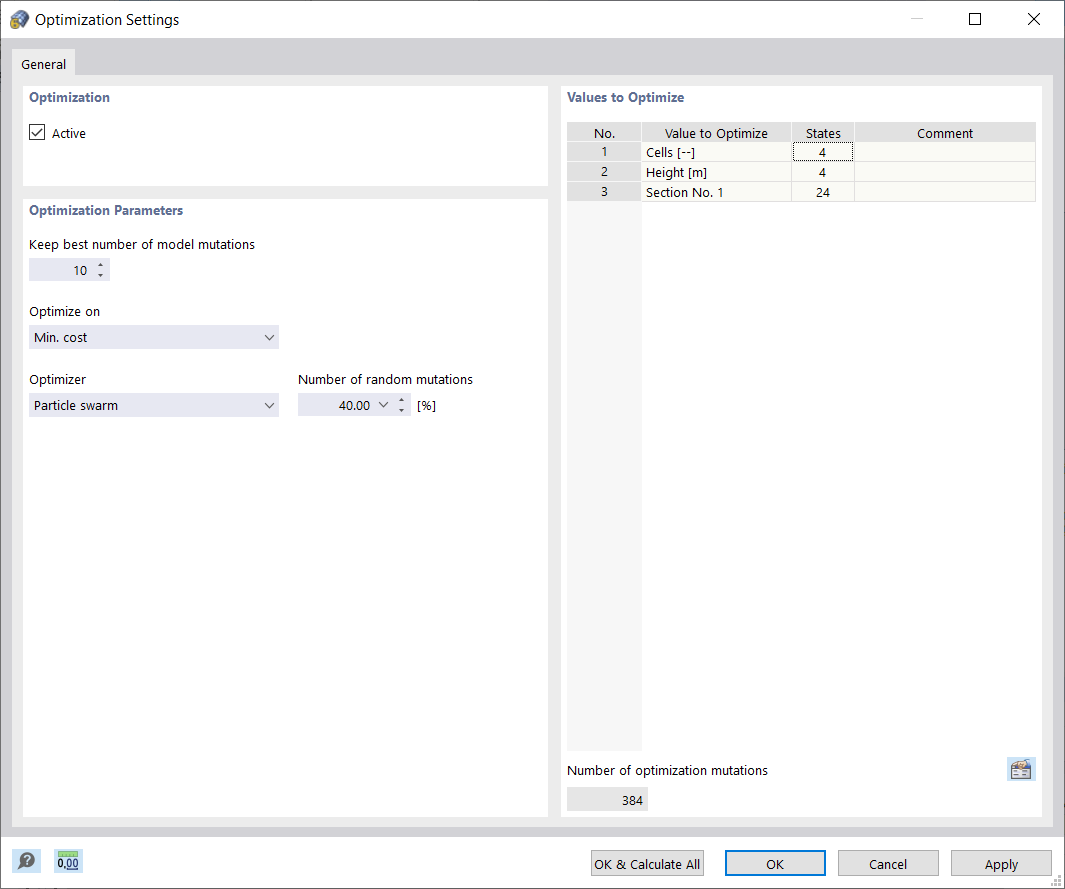
如果在'编辑截面'的基本选项卡中激活了优化选项,则截面只是表格'待优化的值'的一部分(见图image033760 截面优化)。
在对截面、单元格数目和桁架高度进行优化后,程序会显示模型突变(变量)的列表。 在这里您还可以找到重要的优化结果以及相关的优化参数的值。 此列表按降序排序: 在顶部显示假设的最佳解决方案,即最接近优化准则 ' 最小成本 ' 的变量。 通过这种方式,您可以了解更改单个参数的成本,并确定相应参数的最佳值。
CO2 排放量
使用优化和成本/CO2排放量估算的模块的第二部分可以对模型的CO2排放量进行估算。 图片中显示的建筑 image033763 公寓建筑 就是示例。
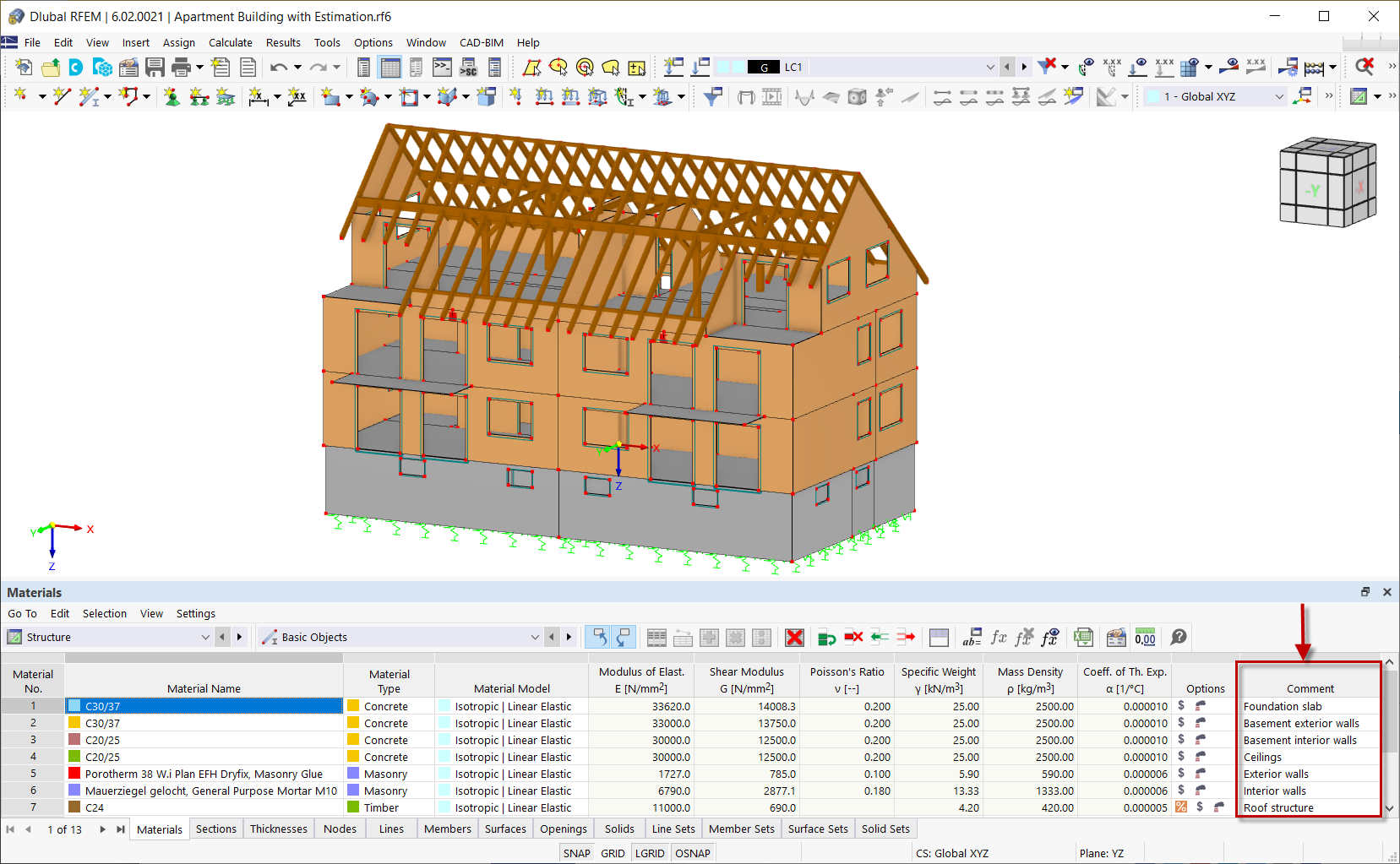
CO2排放量的估算程序与章节 成本 中描述的原理非常相似。 首先,在创建或编辑材料时激活选项CO2排放量估算。
由于构件(楼板、地下室的外墙和内墙、天花板等)的材料不同(见图 image033763 公寓楼),必须对每种激活的材料进行 CO2排放估算。 另一方面,您可以用它来估算某些材料的 CO2排放量。
在同一对话框的 CO2排放量估算选项卡中,您可以为每种材料应用的杆件、面/层和实体定义件排放和相应的单位(件)。 程序会自动计算'总排放量'和'总排放量',并显示在image033765 CO2 排放量估算中。
计件排放值在相关法规中有所规定。
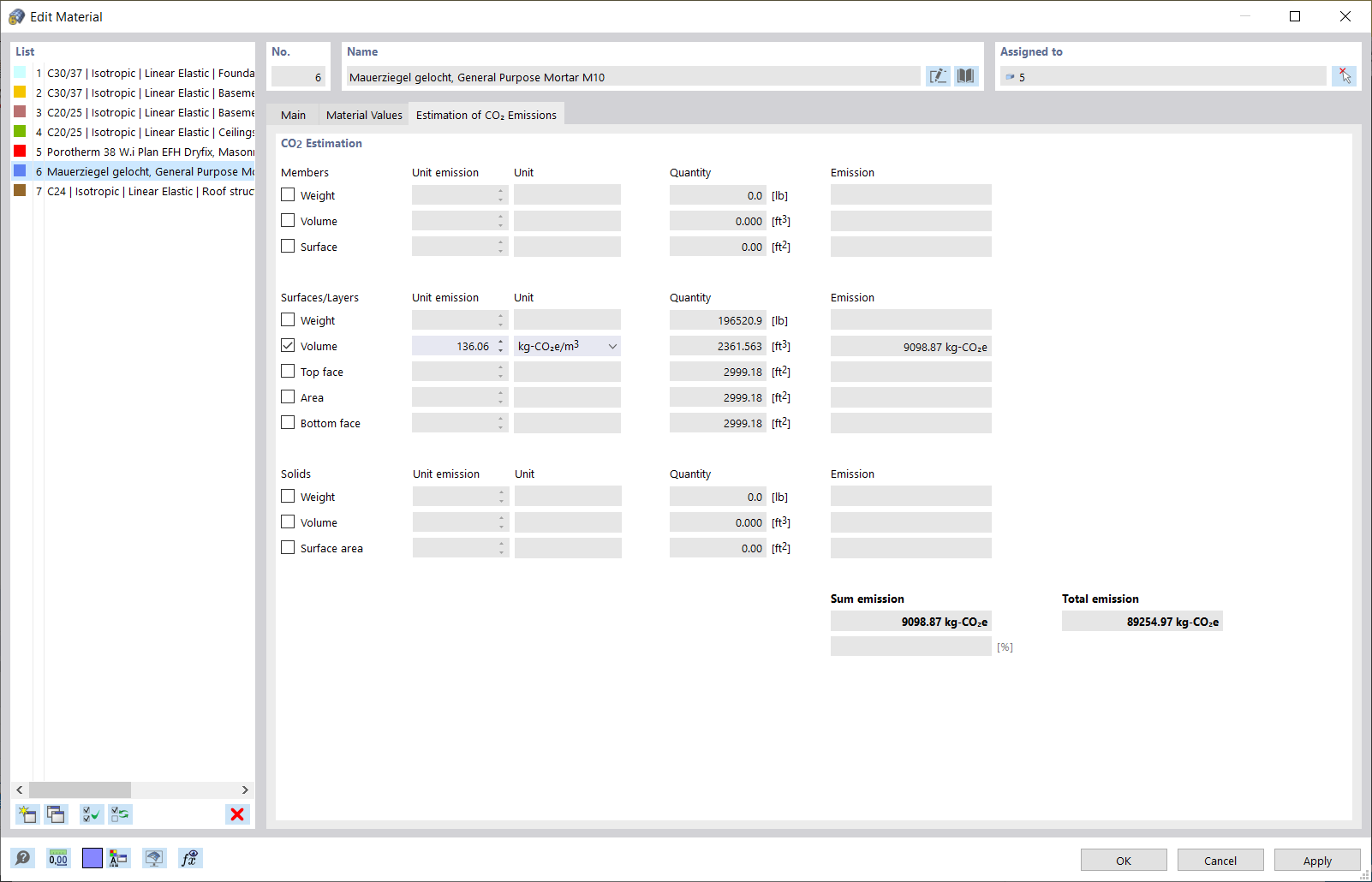
也可以考虑负排放。

GitCode 天启AI是一款由 GitCode 团队打造的智能助手,基于先进的LLM(大语言模型)与多智能体 Agent 技术构建,致力于为用户提供高效、智能、多模态的创作与开发支持。它不仅支持自然语言对话,还具备处理文件、生成 PPT、撰写分析报告、开发 Web 应用等多项能力,真正做到“一句话,让 Al帮你完成复杂任务”。
更多推荐



 47
47 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)