
Coursera self-driving car Part1 Final Project——自动驾驶轨迹跟踪之Pure Pursuit纯跟踪算法推导及Python实现
Coursera self-driving car Part1 Final Project——自动驾驶轨迹跟踪之Pure Pursuit纯跟踪算法推导及Python实现1.Pure Pursuit原理
Coursera self-driving car Part1 Final Project——自动驾驶轨迹跟踪之Pure Pursuit纯跟踪算法推导及Python实现
1.Pure Pursuit原理
参考https://blog.csdn.net/weixin_39549161/article/details/88712443?spm=1001.2014.3001.5506
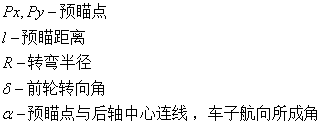
将小车简化为两轮自行车模型
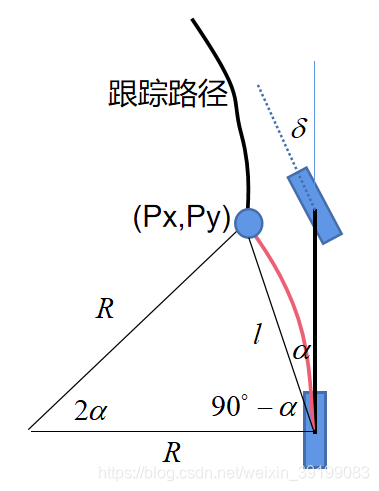
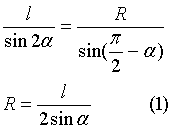
个人理解纯跟踪算法就是让无人驾驶车后轴中心,绕着转弯中心,按转弯半径的圆弧走到待跟踪路径的预瞄点上,预瞄距离l越小,越快收敛到参考轨迹,车辆就越激进。
根据正弦定理
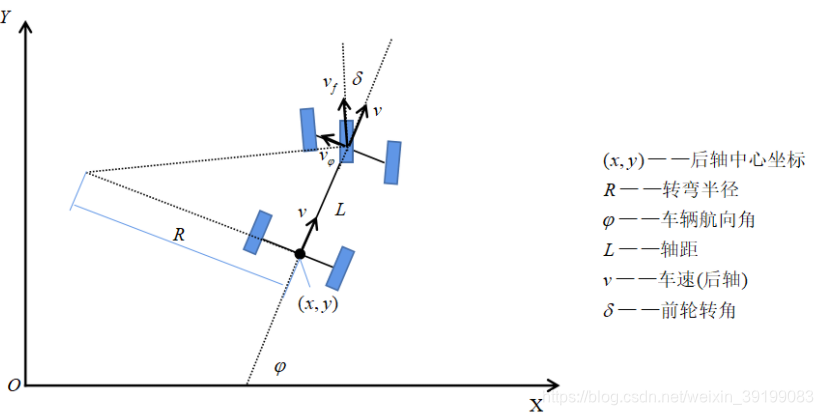
根据上图的几何关系,
联立式(1),(2)
预瞄距离,如果为常数,在低速时效果可能很好,但在高速时太小的预瞄距离导致车辆过于激进出现振荡,所以通常让预瞄距离正比于车速v. 防止车速很小时,l过小加上一个常数偏置。参数k,l0由自己设置,k越小越激进。
则(4)为最终的pure pursuit控制公式
2.python实现
算法原理非常简单,由式4可以看出,关键只要计算出预瞄距离,以及α即可求解当前时刻所需的转向角。
2.1预瞄距离的计算
KLf= 0.1 #look forward gain
Lf0 = 3.0 #look-ahead distance,偏置
#calculate Lf
Lf=KLf*v+Lf02.2 α的计算
由下图可以看出,
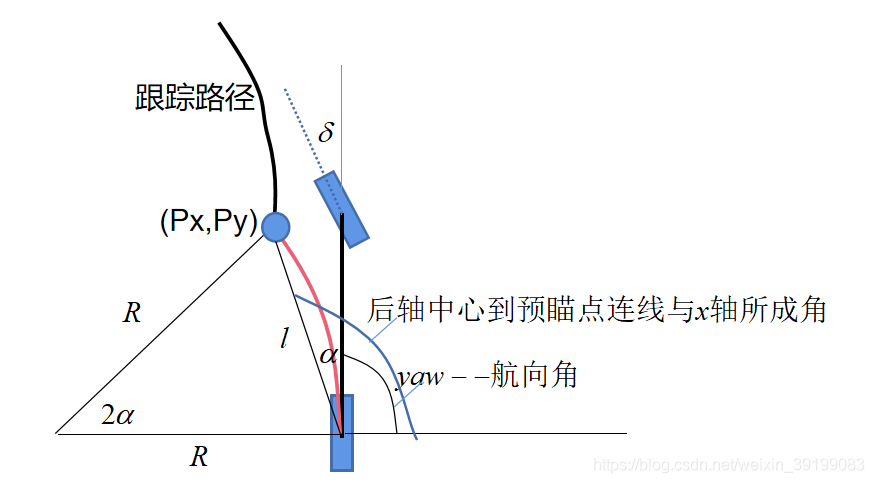
找到预瞄点后,直接用预瞄点和当前后轮中心计算连线与x轴所成角α_hat,然后α_hat减去航向角yaw即为α,代码如下
#计算alpha
alpha_hat = math.atan2(target_y - y,target_x - x)
alpha = alpha_hat - yaw2.3 预瞄点的确定
预瞄点要为我们设定计算公式计算出的预瞄距离,刚好相等可能比较困难,预瞄点有可能落在最近时刻的一小段参考轨迹waypoints里的两个参考点之间,遍历最近时刻的参考点,直到第i个参考点与小车后轴中心的距离刚大于预瞄距离时,则取第i个点为近似预瞄点,代码如下:
#找Target
for i in range(len(waypoints)):
dx=self._current_x-waypoints[i][0]
dy=self._current_y-waypoints[i][1]
d = abs(math.sqrt(dx ** 2 + dy ** 2))
if d>Lf:
target_x=waypoints[i][0]
target_y=waypoints[i][1]
break3. Coursera Final Project说明
参见我另一篇博客
https://blog.csdn.net/weixin_39199083/article/details/116723353?spm=1001.2014.3001.5502 2.1小节
4. 运行结果
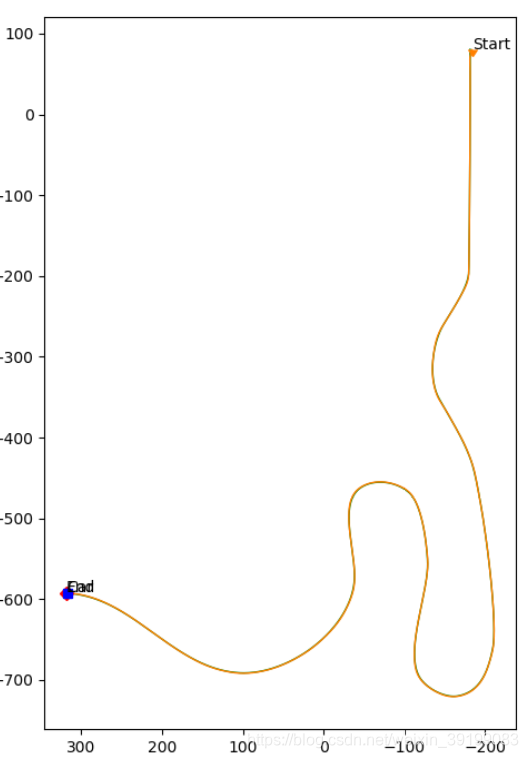
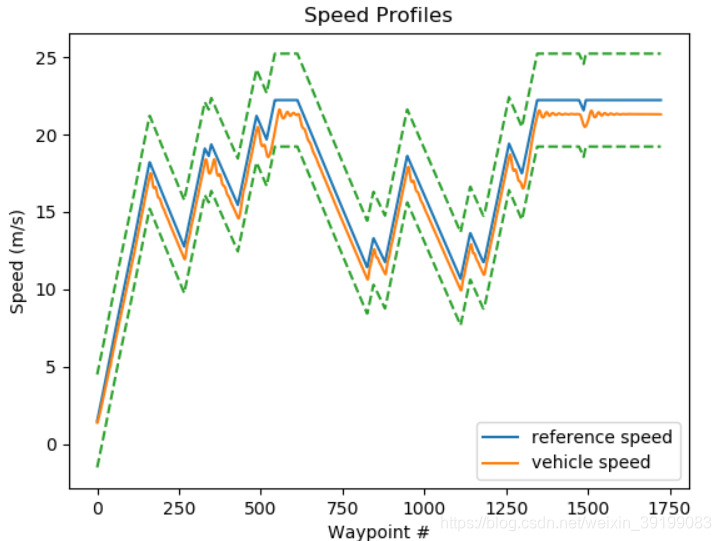
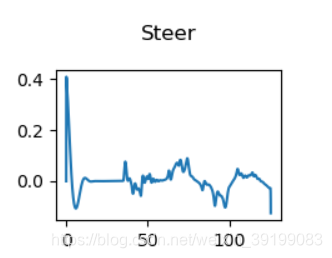
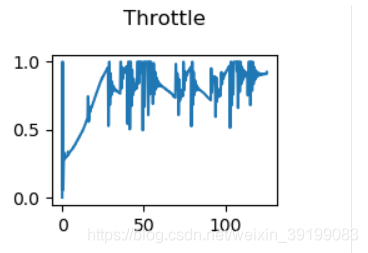
运行视频: https://www.bilibili.com/video/BV18y4y1g7aA
完整代码:https://download.csdn.net/download/weixin_39199083/18817439

GitCode 天启AI是一款由 GitCode 团队打造的智能助手,基于先进的LLM(大语言模型)与多智能体 Agent 技术构建,致力于为用户提供高效、智能、多模态的创作与开发支持。它不仅支持自然语言对话,还具备处理文件、生成 PPT、撰写分析报告、开发 Web 应用等多项能力,真正做到“一句话,让 Al帮你完成复杂任务”。
更多推荐



 2
2 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)