
ROS2——launch文件(十四)
到目前为止,每当我们运行一个ROS节点,都需要打开一个新的终端运行一个命令。机器人系统中节点很多,每次都这样启动好麻烦呀。有没有一种方式可以一次性启动所有节点呢?答案当然是肯定的,那就是Launch启动文件,它是ROS系统中多节点启动与配置的一种脚本。ROS2中的Launch文件就是基于Python描述的。Launch的核心目的是启动节点,我们在命令行中输入的各种参数,在Launch文件中,通过类
ROS2机器人操作系统
前言
到目前为止,每当我们运行一个ROS节点,都需要打开一个新的终端运行一个命令。机器人系统中节点很多,每次都这样启动好麻烦呀。有没有一种方式可以一次性启动所有节点呢?答案当然是肯定的,那就是Launch启动文件,它是ROS系统中多节点启动与配置的一种脚本。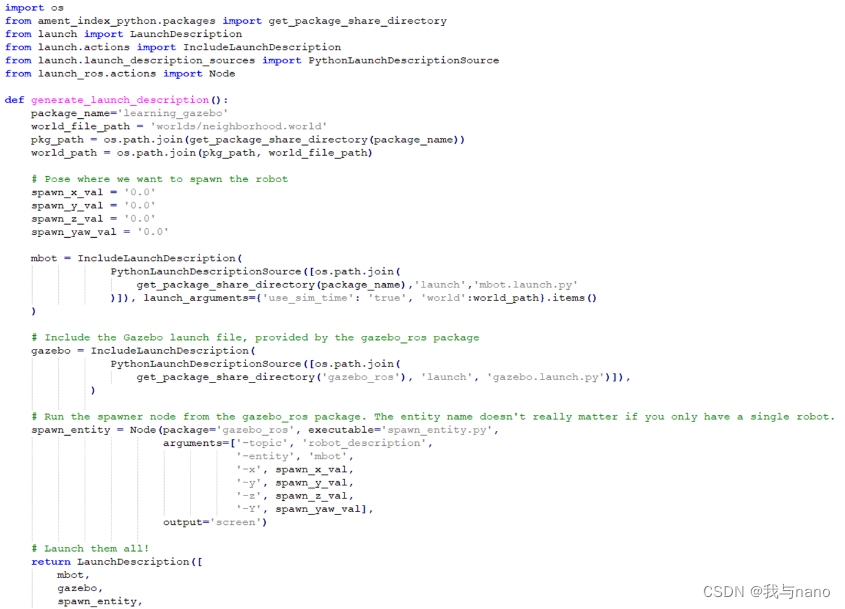
ROS2中的Launch文件就是基于Python描述的。
Launch的核心目的是启动节点,我们在命令行中输入的各种参数,在Launch文件中,通过类似这样的很多代码模版,也可以进行配置,甚至还可以使用Python原有的编程功能,大大丰富了启动过程中的多样化配置。
一、launch文件
多节点启动
启动终端,使用ros2中的launch命令来启动第一个launch文件示例:
$ ros2 launch learning_launch simple.launch.py
运行成功后,就可以在终端中看到发布者和订阅者两个节点的日志信息啦。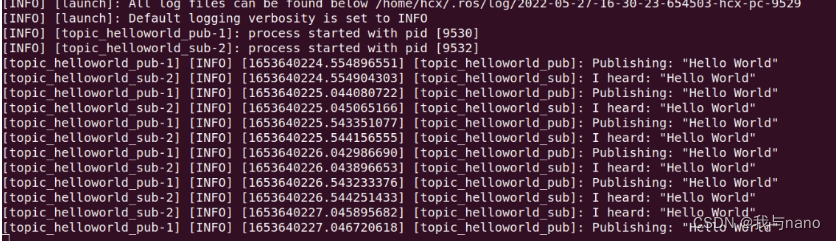
文件解析
from launch import LaunchDescription # launch文件的描述类
from launch_ros.actions import Node # 节点启动的描述类
def generate_launch_description(): # 自动生成launch文件的函数
return LaunchDescription([ # 返回launch文件的描述信息
Node( # 配置一个节点的启动
package='learning_topic', # 节点所在的功能包
executable='topic_helloworld_pub', # 节点的可执行文件
),
Node( # 配置一个节点的启动
package='learning_topic', # 节点所在的功能包
executable='topic_helloworld_sub', # 节点的可执行文件名
),
])
资源重映射
启动一个终端,运行如下例程,很快会看到出现了两个小海龟仿真器界面;再打开一个终端,发布如下话题,让海龟1动起来,海龟2也会一起运动:
$ ros2 launch learning_launch rviz.launch.py
$ ros2 topic pub --rate 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"
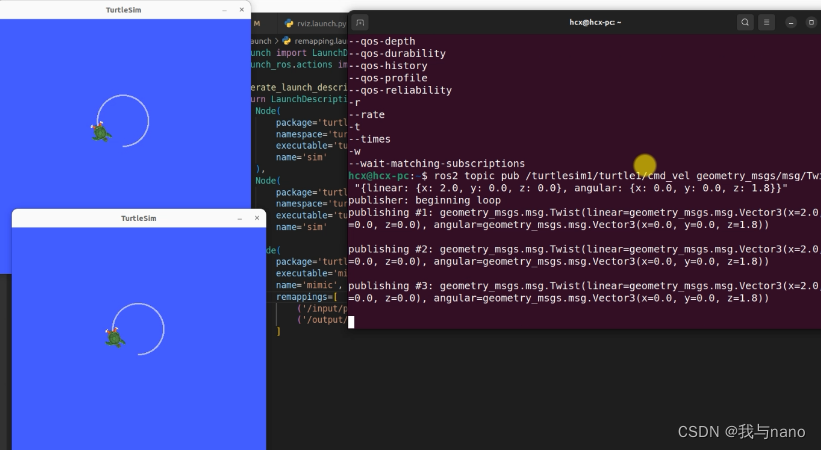
为什么两个海龟都会动呢?这里要用到turtlesim功能包里另外一个节点,叫做mimic,它的功能是订阅某一个海龟的Pose位置,通过计算,变换成一个同样运动的速度指令,发布出去。
至于mimic节点订阅或者发布的话题名叫什么呢?我们就可以通过重映射修改成对应任意海龟的名字。
from launch import LaunchDescription # launch文件的描述类
from launch_ros.actions import Node # 节点启动的描述类
def generate_launch_description(): # 自动生成launch文件的函数
return LaunchDescription([ # 返回launch文件的描述信息
Node( # 配置一个节点的启动
package='turtlesim', # 节点所在的功能包
namespace='turtlesim1', # 节点所在的命名空间
executable='turtlesim_node', # 节点的可执行文件名
name='sim' # 对节点重新命名
),
Node( # 配置一个节点的启动
package='turtlesim', # 节点所在的功能包
namespace='turtlesim2', # 节点所在的命名空间
executable='turtlesim_node', # 节点的可执行文件名
name='sim' # 对节点重新命名
),
Node( # 配置一个节点的启动
package='turtlesim', # 节点所在的功能包
executable='mimic', # 节点的可执行文件名
name='mimic', # 对节点重新命名
remappings=[ # 资源重映射列表
('/input/pose', '/turtlesim1/turtle1/pose'), # 将/input/pose话题名修改为/turtlesim1/turtle1/pose
('/output/cmd_vel', '/turtlesim2/turtle1/cmd_vel'), # 将/output/cmd_vel话题名修改为/turtlesim2/turtle1/cmd_vel
]
)
])
ROS参数设置
启动一个终端,运行如下命令:
$ ros2 launch learning_launch parameters.launch.py
在启动的海龟仿真器中,我们看到背景颜色被改变了,这个颜色参数的设置就是在launch文件中完成的。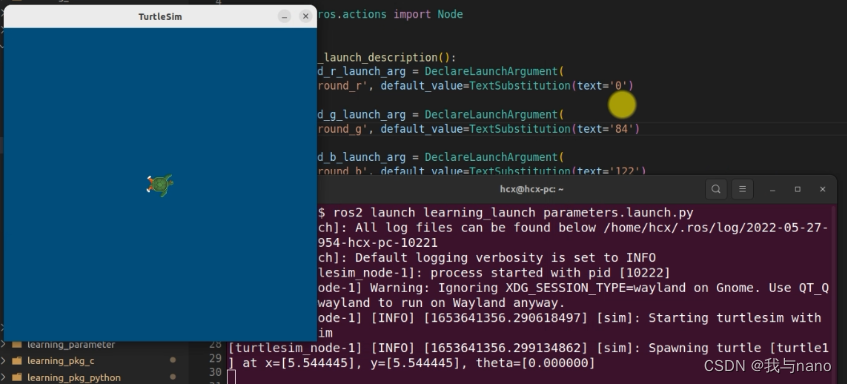
from launch import LaunchDescription # launch文件的描述类
from launch.actions import DeclareLaunchArgument # 声明launch文件内使用的Argument类
from launch.substitutions import LaunchConfiguration, TextSubstitution
from launch_ros.actions import Node # 节点启动的描述类
def generate_launch_description(): # 自动生成launch文件的函数
background_r_launch_arg = DeclareLaunchArgument(
'background_r', default_value=TextSubstitution(text='0') # 创建一个Launch文件内参数(arg)background_r
)
background_g_launch_arg = DeclareLaunchArgument(
'background_g', default_value=TextSubstitution(text='84') # 创建一个Launch文件内参数(arg)background_g
)
background_b_launch_arg = DeclareLaunchArgument(
'background_b', default_value=TextSubstitution(text='122') # 创建一个Launch文件内参数(arg)background_b
)
return LaunchDescription([ # 返回launch文件的描述信息
background_r_launch_arg, # 调用以上创建的参数(arg)
background_g_launch_arg,
background_b_launch_arg,
Node( # 配置一个节点的启动
package='turtlesim',
executable='turtlesim_node', # 节点所在的功能包
name='sim', # 对节点重新命名
parameters=[{ # ROS参数列表
'background_r': LaunchConfiguration('background_r'), # 创建参数background_r
'background_g': LaunchConfiguration('background_g'), # 创建参数background_g
'background_b': LaunchConfiguration('background_b'), # 创建参数background_b
}]
),
])

加载参数文件
以上例程我们在launch文件中一个一个的设置参数,略显麻烦,当参数比较多的时候,建议使用参数文件进行加载。
import os
from ament_index_python.packages import get_package_share_directory # 查询功能包路径的方法
from launch import LaunchDescription # launch文件的描述类
from launch_ros.actions import Node # 节点启动的描述类
def generate_launch_description(): # 自动生成launch文件的函数
config = os.path.join( # 找到参数文件的完整路径
get_package_share_directory('learning_launch'),
'config',
'turtlesim.yaml'
)
return LaunchDescription([ # 返回launch文件的描述信息
Node( # 配置一个节点的启动
package='turtlesim', # 节点所在的功能包
executable='turtlesim_node', # 节点的可执行文件名
namespace='turtlesim2', # 节点所在的命名空间
name='sim', # 对节点重新命名
parameters=[config] # 加载参数文件
)
])
二、Launch文件包含
在复杂的机器人系统中,launch文件也会有很多,此时我们可以使用类似编程中的include机制,让launch文件互相包含。
1.文件解析
import os
from ament_index_python.packages import get_package_share_directory # 查询功能包路径的方法
from launch import LaunchDescription # launch文件的描述类
from launch.actions import IncludeLaunchDescription # 节点启动的描述类
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.actions import GroupAction # launch文件中的执行动作
from launch_ros.actions import PushRosNamespace # ROS命名空间配置
def generate_launch_description(): # 自动生成launch文件的函数
parameter_yaml = IncludeLaunchDescription( # 包含指定路径下的另外一个launch文件
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('learning_launch'), 'launch'),
'/parameters_nonamespace.launch.py'])
)
parameter_yaml_with_namespace = GroupAction( # 对指定launch文件中启动的功能加上命名空间
actions=[
PushRosNamespace('turtlesim2'),
parameter_yaml]
)
return LaunchDescription([ # 返回launch文件的描述信息
parameter_yaml_with_namespace
])
2.功能包编译配置
代码如下(示例):
...
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'launch'), glob(os.path.join('launch', '*.launch.py'))),
(os.path.join('share', package_name, 'config'), glob(os.path.join('config', '*.*'))),
(os.path.join('share', package_name, 'rviz'), glob(os.path.join('rviz', '*.*'))),
],
...
总结
Launch文件在ROS系统中出现的频次相当之高,它就像粘合剂一样,可以自由组装和配置各个节点

GitCode 天启AI是一款由 GitCode 团队打造的智能助手,基于先进的LLM(大语言模型)与多智能体 Agent 技术构建,致力于为用户提供高效、智能、多模态的创作与开发支持。它不仅支持自然语言对话,还具备处理文件、生成 PPT、撰写分析报告、开发 Web 应用等多项能力,真正做到“一句话,让 Al帮你完成复杂任务”。
更多推荐



 5
5 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)