
卡尔曼滤波法进行一维数据滤波(python实现)
文章目录前言一:卡尔曼滤波法原理简单理解二:卡尔曼滤波法五条经典公式三:卡尔曼滤波法实现参考前言最近在做一个蓝牙定位的小项目,在采集ibeancon蓝牙基站RSSI信号强度数据时,噪声对精度的影响特别的严重,翻阅了些文献,里面提到一种卡尔曼滤波法,所以准备使用卡尔曼滤波法来处理我们收集来的一维rssi数据,这片文章,主要简单介绍了卡尔曼滤波法的原理,还有介绍一下如何用代码来实现卡尔曼滤波法。一:卡
前言
最近在做一个蓝牙定位的小项目,在采集ibeancon蓝牙基站RSSI信号强度数据时,噪声对精度的影响特别的严重,翻阅了些文献,里面提到一种卡尔曼滤波法,所以准备使用卡尔曼滤波法来处理我们收集来的一维rssi数据,这片文章,主要简单介绍了卡尔曼滤波法的原理,还有介绍一下如何用代码来实现卡尔曼滤波法。
一:卡尔曼滤波法原理简单理解
若直接看卡尔曼滤波法的经典五条方差,估计很多人都会懵逼,这都讲了啥,xx是个傻鸟。
这里简单介绍下:
1.卡尔曼滤波法是一种融合了当前的系统估计值( X t ) X_t) Xt)
当前测量值( Z t Z_t Zt),还有系统估计误差(W_t),测量误差(V_t) ,来对当前进行预测估计的算法进行预测的一个算法。
2.以一个实际温度的例子,介绍下卡尔曼滤波法
(1)要估计k时刻的实际温度值
(2)k-1时刻测量的温度值为 T k − 1 = 23 T_{k-1}=23 Tk−1=23
(3)假设 T k = T k − 1 = 25 T_k=T_{k-1}=25 Tk=Tk−1=25, T k T_k Tk即为系统估计值
(4)从温度计测量,得到k时刻的测量值为 T k z T_{kz} Tkz
(5)预测的噪声 v ( k ) = 4 v(k)=4 v(k)=4,可以是实际环境的温度在一段时间内,温度数据波动的方差
(6)测量的噪声 w ( k ) = 4 w(k)=4 w(k)=4,可以是温度计测量的误差
(7)当前有两个 T k = 23 T_k=23 Tk=23和 T k z = 25 T_{kz}=25 Tkz=25,然后引入kalman gain(k_g),通过**预测的噪声 v ( k ) = 4 v(k)=4 v(k)=4 ,与测量的噪声 w ( k ) = 4 w(k)=4 w(k)=4**的
来融合两个 T k = 23 T_k=23 Tk=23和 T k z = 25 T_{kz}=25 Tkz=25。
K g 2 = w ( x ) 2 / ( w ( k ) 2 + v ( k ) 2 ) {K_g}^2 = w(x)^2/(w(k)^2 + v(k)^2) Kg2=w(x)2/(w(k)2+v(k)2) = 5 2 / ( 5 2 + 4 2 ) 5^2 / ( 5^2 + 4^2 ) 52/(52+42)
(8)最终计算得 k g = 0.78 k_g=0.78 kg=0.78,则我们估算出k时刻的实际温度为:
T = T k + K g ∗ ( T k z − T k ) T = {T_k}+{K_g}*(T_{kz} - T_k) T=Tk+Kg∗(Tkz−Tk) = 23 + 0.78 ∗ ( 25 − 23 ) = 24.56 23 + 0.78*(25-23) = 24.56 23+0.78∗(25−23)=24.56
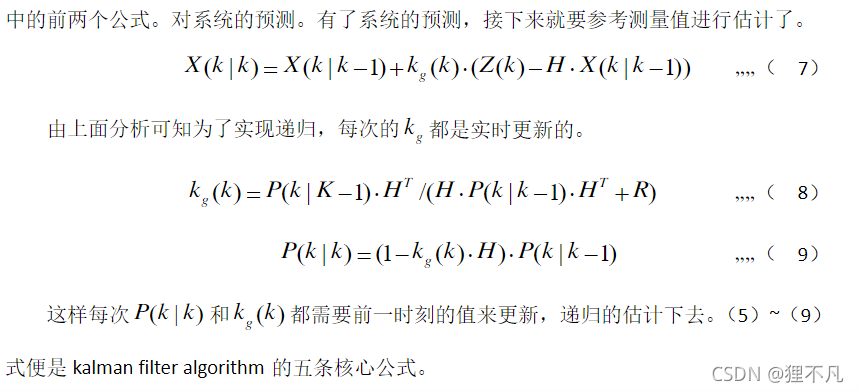
二:卡尔曼滤波法五条经典公式
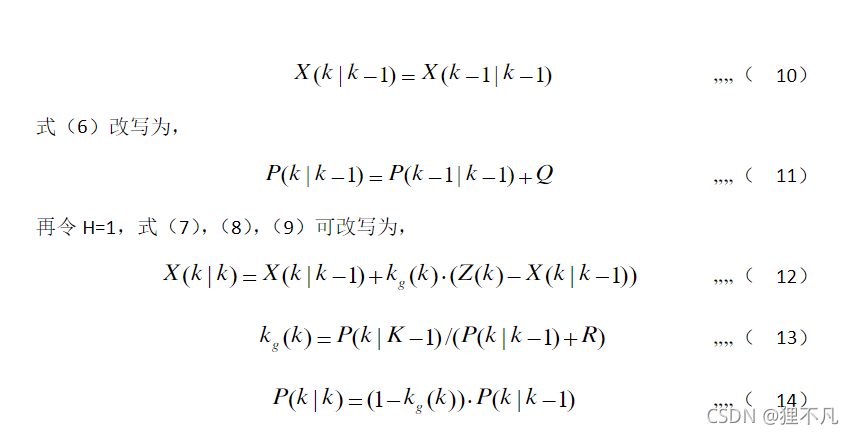
三:卡尔曼滤波法实现
参考了卡尔曼滤波法C语言实现里边的实现,这里整理了C与python的一维实现。
import numpy as np
import matplotlib.pyplot as plt
"""
Q 系统噪声
R 测量噪声
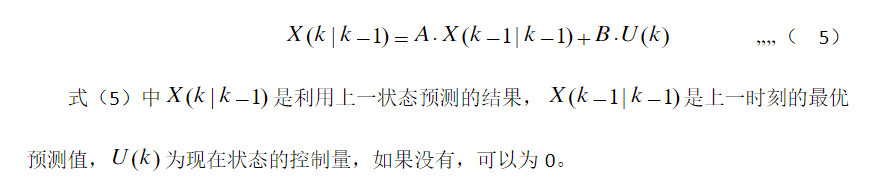
X(k|k-1) 上一次状态预测结果
X(k-1|k-1) 上一时刻的最优预测值
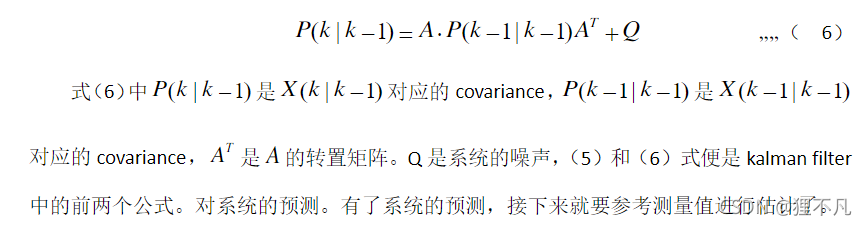
P(k|k-1) X(k|k-1)对应的convariance协方差
P(k-1|k-1) X(k-1|k-1) 对应的convariance协方差
"""
x_last = 0
p_last = 0
Q = 0.1 #系统噪声
R = 0.5 #测量噪声
def kalman(z_measure,x_last=0,p_last=0,Q=0.018,R=0.0542):
x_mid = x_last
p_mid = p_last + Q
kg = p_mid/(p_mid + R)
x_now = x_mid + kg*(z_measure - x_mid)
p_now = (1-kg)*p_mid
p_last = p_now
x_last = x_now
return x_now,p_last,x_last
real = np.sin(np.linspace(0,10,100))
chao = np.random.rand(100)-0.5
x = real+chao
y = []
for i in range(len(x)):
pred,p_last,x_last = kalman(x[i],x_last,p_last,Q,R)
y.append(pred)
plt.plot(real,color="b") #真实值
plt.plot(x,color="g") #测量值
plt.plot(y,color="r") #预测值
plt.show()
参考

GitCode 天启AI是一款由 GitCode 团队打造的智能助手,基于先进的LLM(大语言模型)与多智能体 Agent 技术构建,致力于为用户提供高效、智能、多模态的创作与开发支持。它不仅支持自然语言对话,还具备处理文件、生成 PPT、撰写分析报告、开发 Web 应用等多项能力,真正做到“一句话,让 Al帮你完成复杂任务”。
更多推荐



 15
15 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)