
ROS-LLM入门指南 - 将大语言模型引入ROS机器人的开源框架
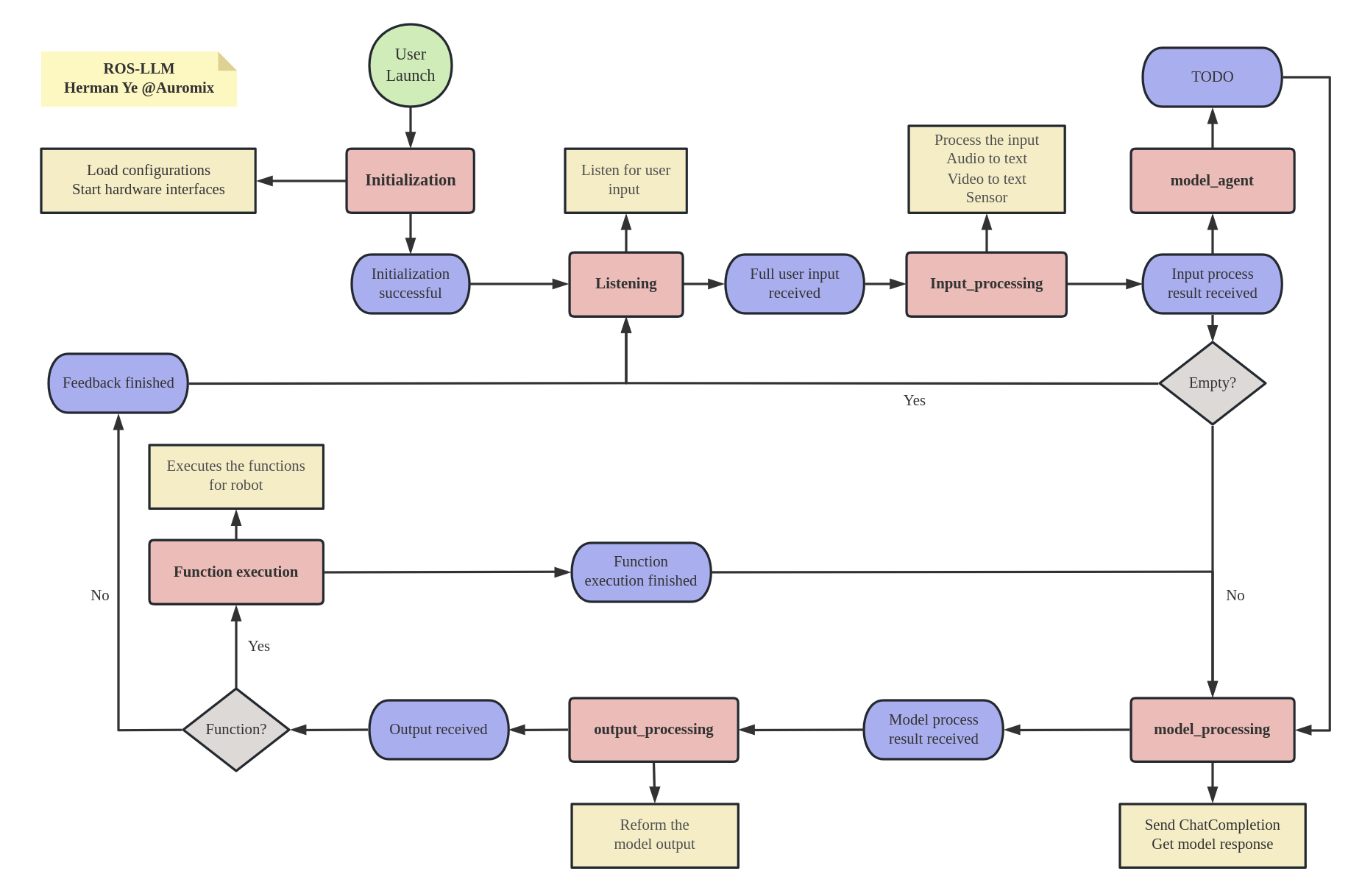
ROS-LLM是一个专为ROS(机器人操作系统)设计的嵌入式智能框架。它允许通过自然语言与机器人进行交互,并利用大型语言模型(如GPT-4和ChatGPT)来进行机器人的决策和控制。这个框架设计简单易用,只需提供机器人的功能接口,就可以在10分钟内完成集成和使用。
ROS-LLM简介
ROS-LLM是一个专为ROS(机器人操作系统)设计的嵌入式智能框架。它允许通过自然语言与机器人进行交互,并利用大型语言模型(如GPT-4和ChatGPT)来进行机器人的决策和控制。这个框架设计简单易用,只需提供机器人的功能接口,就可以在10分钟内完成集成和使用。
主要特点
ROS-LLM具有以下几个主要特点:
-
🤖 ROS集成:无缝对接ROS系统,实现全面的机器人控制。
-
🧠 大语言模型支持:利用GPT-4、ChatGPT等模型增强决策和任务管理能力。
-
🗣️ 自然交互:通过对话方式实现与机器人的直观沟通。
-
🔄 灵活控制:基于语言模型解释实现运动和导航等任务控制。
-
🔌 简化扩展:提供简单接口,便于整合机器人功能。
-
🛠️ 快速开发:可在短时间内创建交互式机器人控制体验。
-
📚 教学示例:提供全面的教程和示例,便于理解和实施。
-
🗃️ 历史存储:保留本地聊天历史,方便回顾和参考。
快速入门
要开始使用ROS-LLM,请按以下步骤操作:
- 克隆仓库:
git clone https://github.com/Auromix/ROS-LLM.git
- 安装依赖:
cd ROS-LLM/llm_install
bash dependencies_install.sh
- 配置OpenAI设置:
cd ROS-LLM/llm_install
bash config_openai_api_key.sh
- 配置AWS设置(可选):
cd ROS-LLM/llm_install
bash config_aws.sh
- 配置OpenAI Whisper设置(可选):
pip install -U openai-whisper
pip install setuptools-rust
- 构建工作空间:
cd <your_ws>
rosdep install --from-paths src --ignore-src -r -y
colcon build --symlink-install
- 运行演示:
source <your_ws>/install/setup.bash
ros2 launch llm_bringup chatgpt_with_turtle_robot.launch.py
启动监听:
ros2 topic pub /llm_state std_msgs/msg/String "data: 'listening'" -1
未来发展计划
ROS-LLM团队正在持续改进框架,计划在未来版本中添加以下功能:
- 代理机制:更好地划分长序列任务
- 外部函数反馈通道:辅助模型决策
- 导航接口:支持导航相关任务
- 传感器输入接口:融入环境感知能力
- 视觉模型集成:如Palm-e等
- 持续优化:提高框架的合理性和可扩展性
参与贡献
欢迎为ROS-LLM项目做出贡献!在提交pull request之前,请阅读贡献指南。
如果您觉得这个项目有用,请考虑在GitHub上给它一个⭐️星标!您的支持将帮助我们改进项目并鼓励进一步的开发。别忘了与可能受益的朋友和同事分享。感谢您的支持!
ROS-LLM为机器人开发者提供了一个强大而灵活的工具,让机器人具备自然语言交互和智能决策能力。无论您是机器人爱好者还是专业开发者,都可以通过ROS-LLM快速为您的机器人赋能,开启智能机器人的无限可能!
文章链接:www.dongaigc.com/a/ros-llm-getting-started-guide
https://www.dongaigc.com/a/ros-llm-getting-started-guide

GitCode 天启AI是一款由 GitCode 团队打造的智能助手,基于先进的LLM(大语言模型)与多智能体 Agent 技术构建,致力于为用户提供高效、智能、多模态的创作与开发支持。它不仅支持自然语言对话,还具备处理文件、生成 PPT、撰写分析报告、开发 Web 应用等多项能力,真正做到“一句话,让 Al帮你完成复杂任务”。
更多推荐



 9
9 0
0- 0



 已为社区贡献25条内容
已为社区贡献25条内容

所有评论(0)