
关于TF变换的学习笔记(一)
所以说,从base_link坐标系到base_laser坐标系之间的变换就是base_link上的点-(0.1,0,0.2)就得到base_laser坐标系上的点 ,反过来就是在base_laser上的点+(0.1,0,0.2)就得到base_link上的点.。还是小车+激光雷达模型,激光雷达扫描到前面的一面墙,得到的激光点在激光雷达坐标系base_laser里的坐标是(0.3,0.0,0.0),
这段时间一直在跟着任乾大佬的文章学习slam定位,发现还是得把TF重新学习一下,之前学的不扎实.就跟着网上的教程学习,这里记录一下学习的过程和笔记.
在网上看了很多教程后,发现TF最重要的是它相邻两个节点之间只有一个遍历的方法,一个重点,这表名了,在坐标传递的过程中的唯一性.
首先是跟着这篇文档学习的,
学习tf变换前要先学习一个命令,是可视化显示tf_tree的命令
rosrun rqt_tf_tree rqt_tf_tree
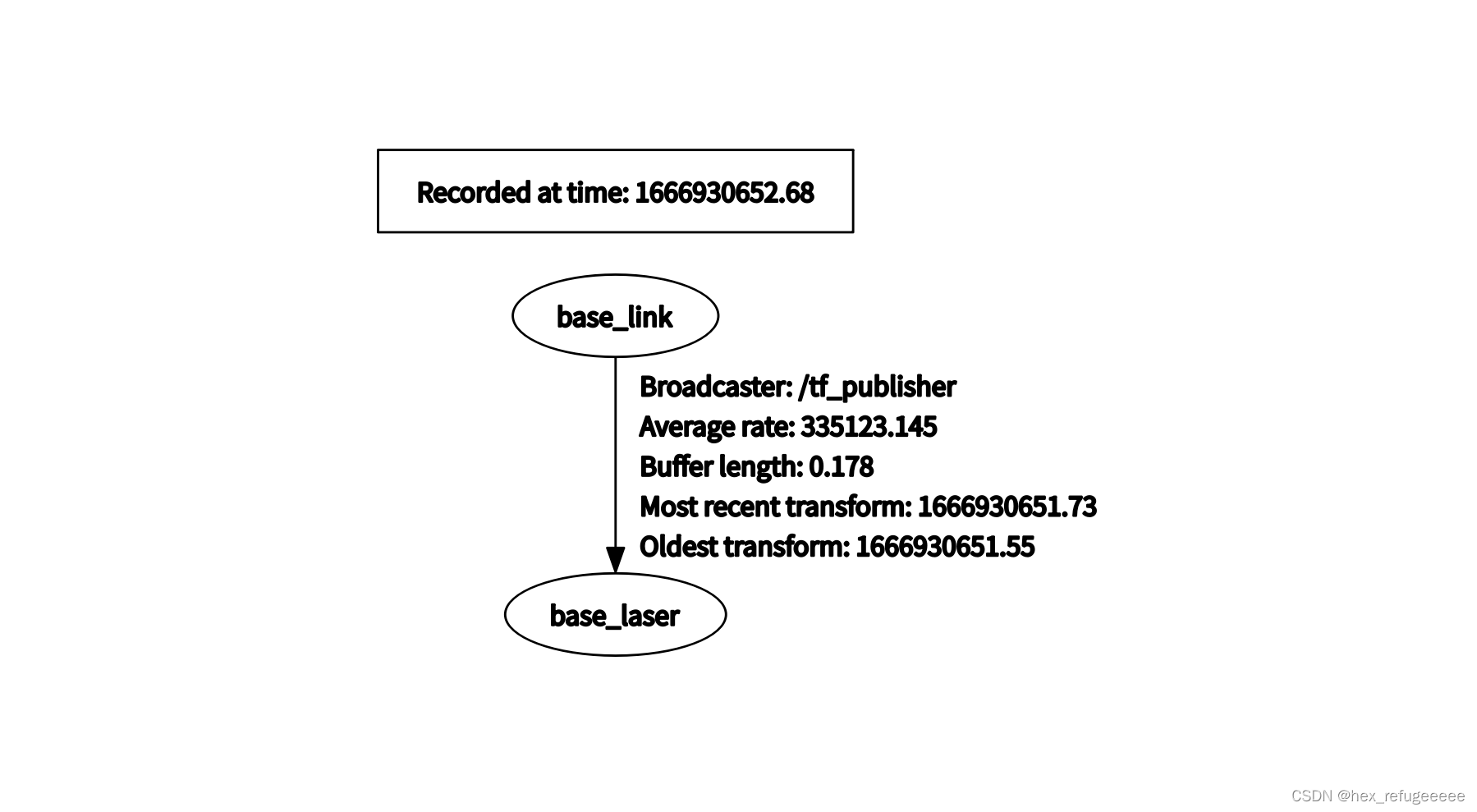
说明是从base_link是frame_id,而base_laser是child_frame_id,然后具体的变换需要根据源码来判断.
一.背景介绍
有一个小车它的坐标系为base_link,小车上有一个激光雷达它的坐标系为base_laser,如下图所示:
红色的部分是base_link
灰色的部分是base_laser
左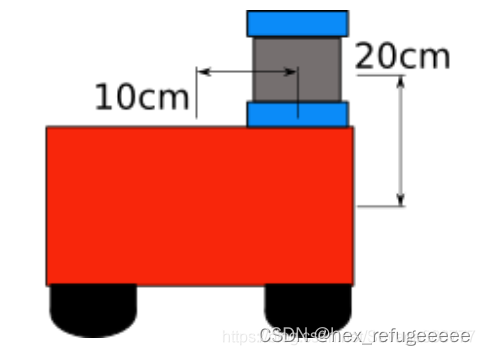 右
右
激光雷达在在小车的中心位置的右上方具体位移t矩阵tf::Vector3(0.1,0,0.2),以右手坐标系,图片右边的为x轴.
所以说,从base_link坐标系到base_laser坐标系之间的变换就是base_link上的点-(0.1,0,0.2)就得到base_laser坐标系上的点 ,反过来就是在base_laser上的点+(0.1,0,0.2)就得到base_link上的点.
这样只有不多的坐标系转换比较容易理解,但在复杂的工程中设计好几十个变换,理解起来就比较复杂.ros为我们提供了TF变换,来辅助我们在工程中进行这种复杂的坐标系转换.
以下图为例:
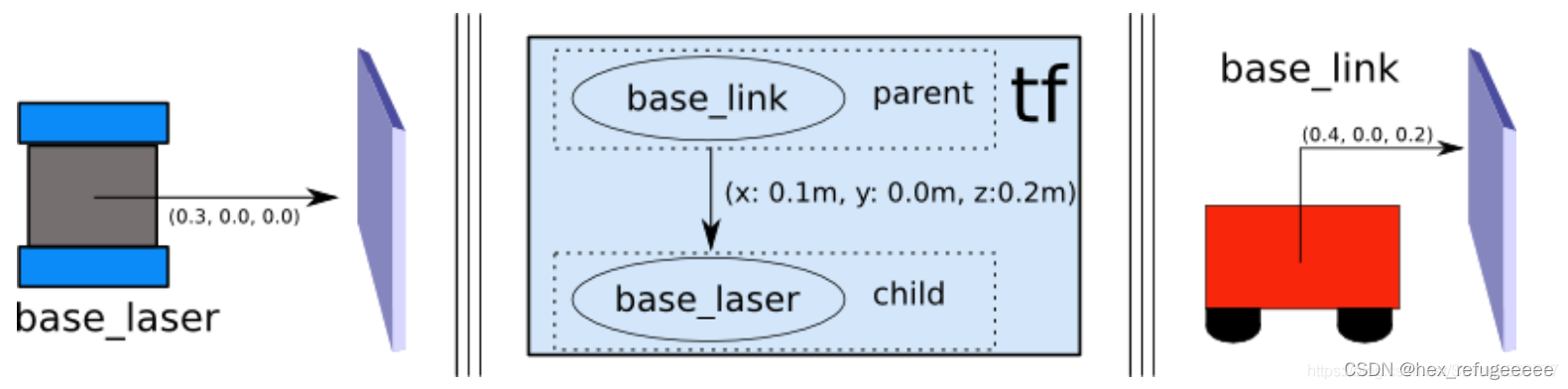
还是小车+激光雷达模型,激光雷达扫描到前面的一面墙,得到的激光点在激光雷达坐标系base_laser里的坐标是(0.3,0.0,0.0),通过上面的转换关系,可以得到激光点在小车坐标系base_link里的坐标是(0.4,0.0,0.2).
二.具体发布的例子
通过一个例子来说明:
首先创建一个ros工作空间和相应的包,用到了roscpp tf geometry_msgs等包
mkdir -p catkin_ws/src && cd catkin_ws/src
catkin_create_pkg robot_setup_tf roscpp tf geogmetry_msgs然后在src下创建tf_broadcaster.cpp,以下为源码:
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "tf_publisher");
ros::NodeHandle nh;
ros::Rate r(100);
tf::TransformBroadcaster broadcaster;
while(nh.ok())
{
broadcaster.sendTransform(
tf::StampedTransform(
tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0.1, 0.0, 0.2)),
ros::Time::now(),
"base_link",
"base_laser")
);
// 这里发送的是从base_laser到base_link下的T矩阵
// nh.sleep();
}
return 0;
}这里核心的有两处,
tf::TransformBroadcaster broadcaster这个类的来源于头文件#include<tf/transform_broadcaster.h>
目的是为了帮助我们更快捷传送tf数据格式,有点类似于封装了大部分功能的topic通讯中的publish.
broadcaster.sendTransform(tf::StampedTransform(
tf::Transform(tf::Quatenion(0,0,0,1),
tf::Vector3(0.1,0.0,0.2)),
ros::Time::now(),
"base_link",
"base_laser"));这里调用了broadcaster的函数sendTransform()这个函数的主要作用:
/** \brief Send a StampedTransform
* The stamped data structure includes frame_id, and time, and parent_id already. */
void sendTransform(const StampedTransform & transform);主要是广播发送StampedTransform类型的数据结构
tf::StampedTransform()函数的主要作用:
ros::Time stamp_; ///< The timestamp associated with this transform
std::string frame_id_; ///< The frame_id of the coordinate frame in which this transform is defined
std::string child_frame_id_; ///< The frame_id of the coordinate frame this transform defines
StampedTransform(const tf::Transform& input, const ros::Time& timestamp, const std::string & frame_id, const std::string & child_frame_id):
tf::Transform (input), stamp_ ( timestamp ), frame_id_ (frame_id), child_frame_id_(child_frame_id){ }包含了各种信息的数据结构,针对源码进行分析.
第一个参数是base_link和base_laser之间的坐标系转换的关系,
第二个参数是时间戳,
第三个参数是parent_frame_id,就是base_link,
第四个参数是child_frame_id,就是base_laser.
源码解释完毕,之后编译运行
注意CMakeLists.txt中需要加入这几行:
add_executable(tf_broadcaster src/tf_broadcaster.cpp)
add_dependencies(tf_broadcaster ${tf_broadcaster_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(tf_broadcaster
${catkin_LIBRARIES}
)一定要加上add_dependencies(...)不然会报什么什么main缺失.
然后就catkin_make运行,记得要source 一下
看一下rqt
只有我们定义的节点/tf_publisher,
在用rostopic echo /tf观察一下,有没有发送
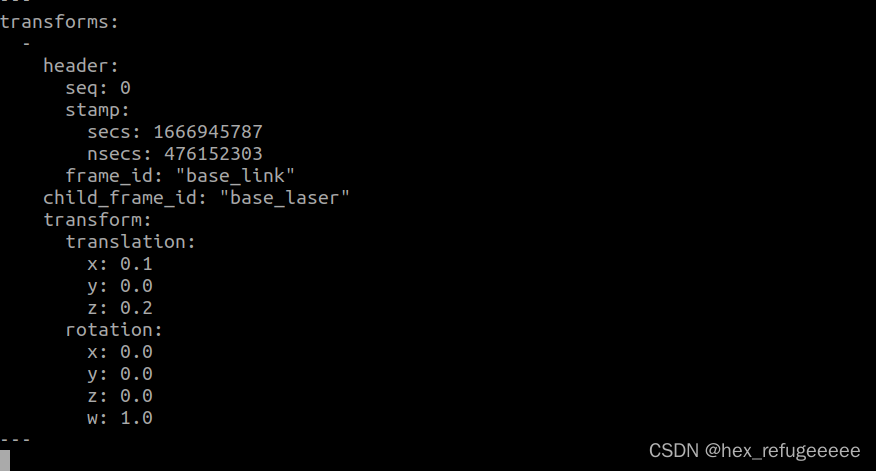
说明tf::TransformBroadcaster 和publish类似.都是发送数据
三.具体接收的例子
还是在刚刚的包中,在src文件下新建tf_listener.cpp文件
#include <ros/ros.h>
#include <geometry_msgs/PointStamped.h>
#include <tf/transform_listener.h>
void transformPoint(const tf::TransformListener& listener){
//创建一个函数,参数为TransformListener,作用为将“base_laser”坐标系的点,变换到“base_link”坐标系中。
geometry_msgs::PointStamped laser_point;
laser_point.header.frame_id = "base_laser";
//we'll just use the most recent transform available for our simple example
laser_point.header.stamp = ros::Time();
//消息名字最后的“Stamped”的意义是,它包含了一个头部,
//允许我们去把时间戳和消息的frame_id相关关联起来。
//我们将会设置laser_point的时间戳为ros::time(),
//即是允许我们请求TransformListener取得最新的变换数据。
//创建的点为虚拟点
laser_point.point.x = 0.3;
laser_point.point.y = 0.0;
laser_point.point.z = 0.0;
try{
geometry_msgs::PointStamped base_point;
listener.transformPoint("base_link", laser_point, base_point);
//我们已经有了从“base_laser”到“base_link”变换的点数据。进一步,我们通过TransformListener对象,
// 调用transformPoint(),填充三个参数来进行数据变换。第1个参数,代表我们想要变换的目标坐标系的名字。
// 第2个参数填充需要变换的原始坐标系的点对象,第3个参数填充,目标坐标系的点对象。
// 所以,在函数调用后,base_point里存储的信息就是变换后的点坐标。
ROS_INFO("base_laser: (%.2f, %.2f. %.2f) -----> base_link: (%.2f, %.2f, %.2f) at time %.2f",
laser_point.point.x, laser_point.point.y, laser_point.point.z,
base_point.point.x, base_point.point.y, base_point.point.z,
base_point.header.stamp.toSec());
}
catch(tf::TransformException& ex){
ROS_ERROR("Received an exception trying to transform a point from \"base_laser\" to \"base_link\": %s", ex.what());
}
}
int main(int argc, char** argv){
ros::init(argc, argv, "robot_tf_listener");
ros::NodeHandle n;
tf::TransformListener listener(ros::Duration(10));
//we'll transform a point once every second
ros::Timer timer = n.createTimer(ros::Duration(1.0), boost::bind(&transformPoint, boost::ref(listener)));
ros::spin();
return 0;
}
里面的注释写的很详细了,具体的看注释就好了
核心函数有:
tf::TransformListener listener(ros::Duration(10));来自头文件#include <tf/transform_listener.h>
作用是自动订阅transform信息
/** \brief This class inherits from Transformer and automatically subscribes to ROS transform messages */
class TransformListener : public Transformer { //subscribes to message and automatically stores incoming data ros::Timer timer = nh.createTimer(ros::Duration(1.0), boost::bind(&transformPoint, boost::ref(listener)));这里写的看不大明白又用了bind,又用了多线程,不是重点,以后再研究
listener.transformPoint("base_link", laser_point, base_point); /** \brief Transform a Stamped Point Message into the target frame
* This can throw all that lookupTransform can throw as well as tf::InvalidTransform */
void transformPoint(const std::string& target_frame, const geometry_msgs::PointStamped& stamped_in, geometry_msgs::PointStamped& stamped_out) const;这个函数的主要作用是将第二个参数的数据转换到frame_id是第一个参数的坐标系中,并且将转换后的第一个参数的坐标系中的数据保存到第三个参数中.
有点绕,简单来说就是
第一个参数是一个坐标系,
第二个参数是另一个坐标系中点的数据,
第三个参数是前面那个坐标系中点的数据,
然后函数的作用就是将订阅到之前发送的tf变换数据,应用到这里,将child_frame_id到frame_id变换作用于不同坐标系上的点.
然后运行catkin_make,还要source一下

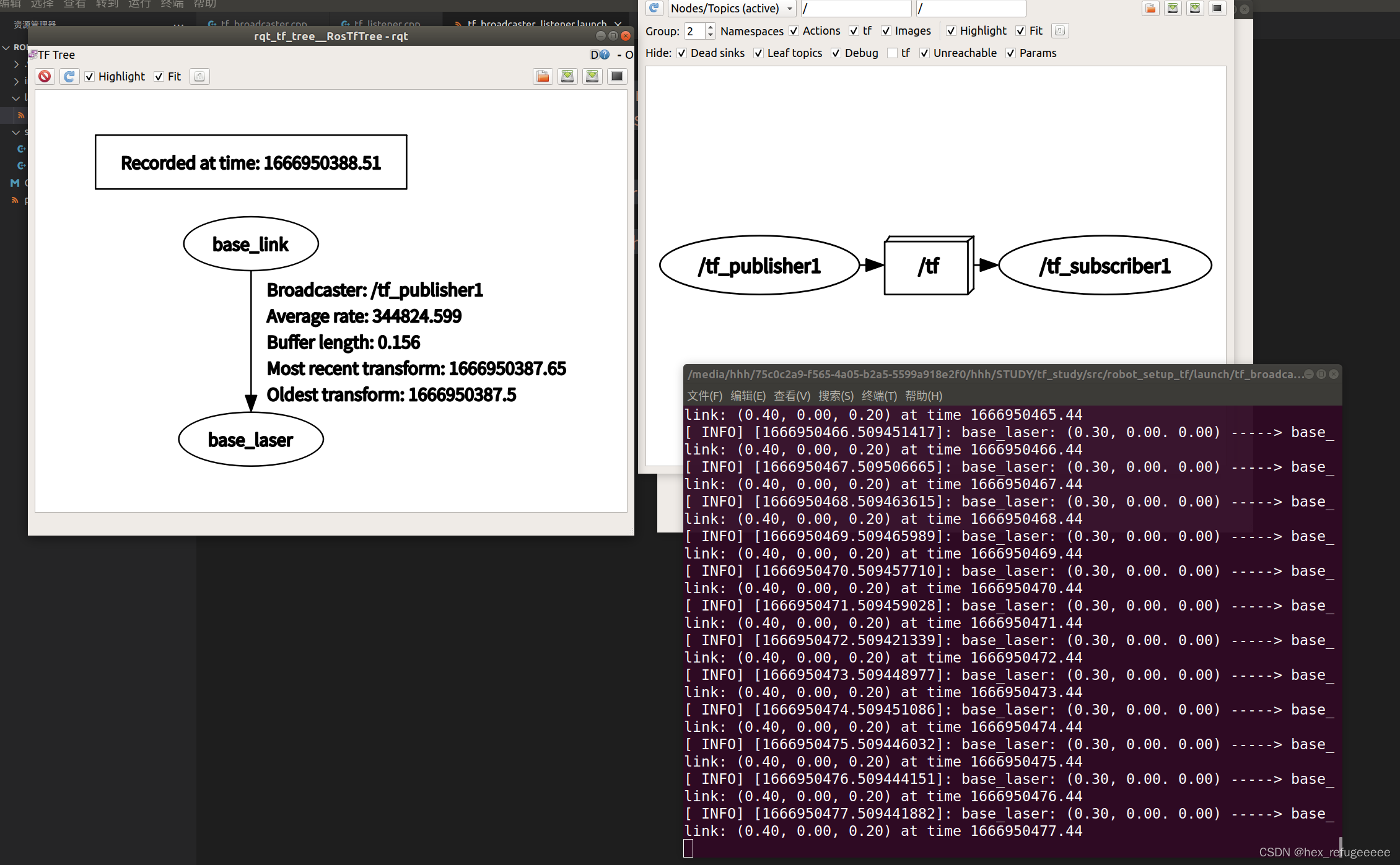
看一下rqt_graph
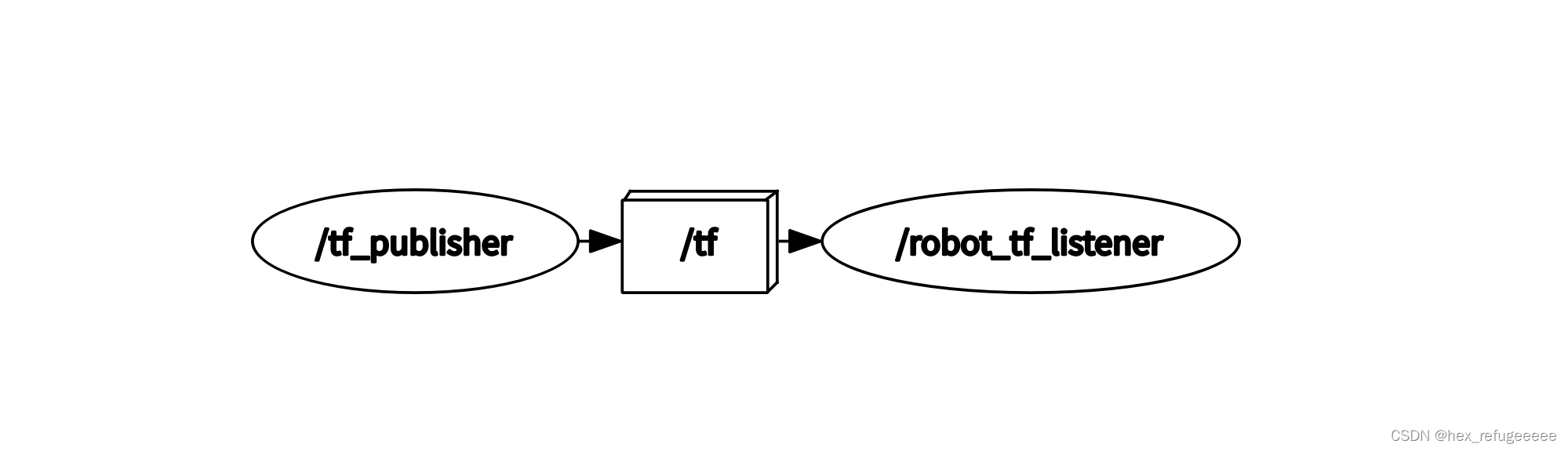
和topic通讯几乎一样,说明就是封装了大部分功能的topic通讯
最后把它们整合一下,写一个launch文件:
<launch>
<node pkg="robot_set_up" type="tf_broadcaster" name="tf_publisher1" output="screen" />
<node pkg="robot_set_up" type="tf_listener" name="tf_subscriber1" output="screen" />
</launch>发现运行的时候总是报错,
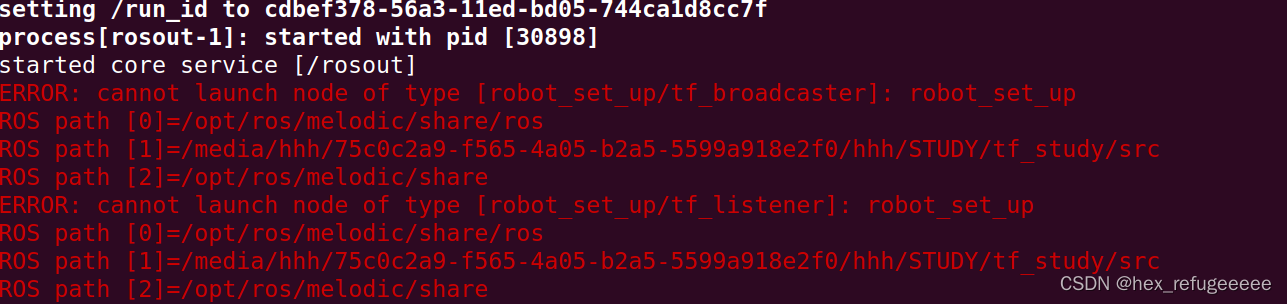
卡了我好久....
最后发现是pkg的名字写错了....
所以一定要细心!!!
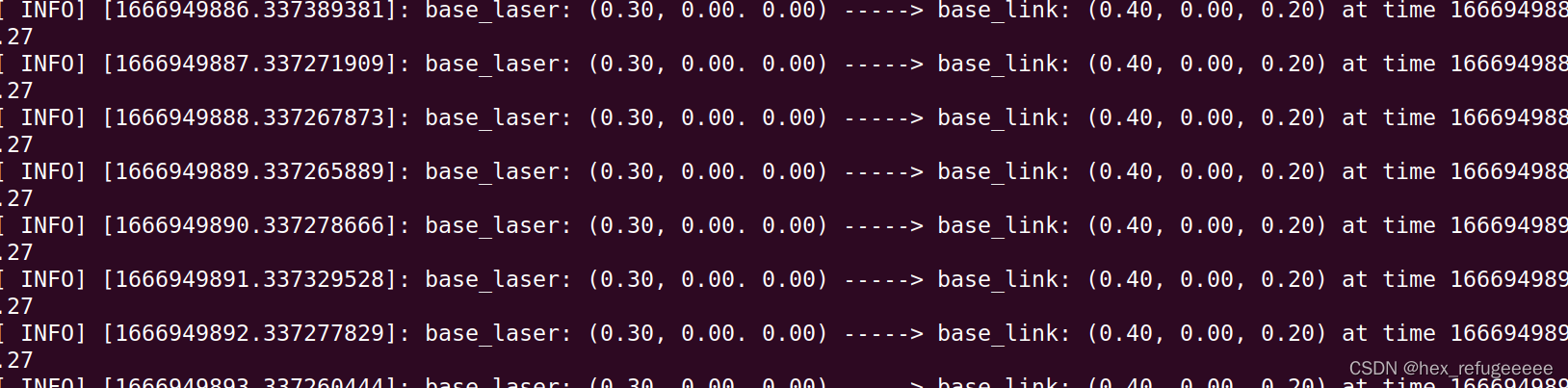
然后就成功运行了.
最后把他们全部添加到launch文件中去,包括rqt_graph, rosrun
<launch>
<node pkg="robot_setup_tf" type="tf_broadcaster" name="tf_publisher1" output="screen" />
<node pkg="robot_setup_tf" type="tf_listener" name="tf_subscriber1" output="screen" />
<!-- 运行tf_tree查看 -->
<node pkg="rqt_tf_tree" type="rqt_tf_tree" name="rqt_tf_tree" />
<!-- 运行rqt_graph -->
<node pkg="rqt_graph" type="rqt_graph" name="rqt_graph" />
</launch>最后运行大合影!
GitCode AI社区是一款由 GitCode 团队打造的智能助手,AI大模型社区、提供国内外头部大模型及数据集服务。
更多推荐

 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)